Arduino Elegoo MEGA2560 R3ボードでアナログジョイスティックモジュールによるサーボモーターの制御を行ってみます。
■用意したもの
・Arduinoバージョン1.8.13がインストールされているPC(Windows10)
・Elegoo MEGA2560 R3ボード、1個(https://amzn.to/33ytufU)

・アナログジョイスティックモジュール(Joystick module)、1個(https://amzn.to/35AQ33U)

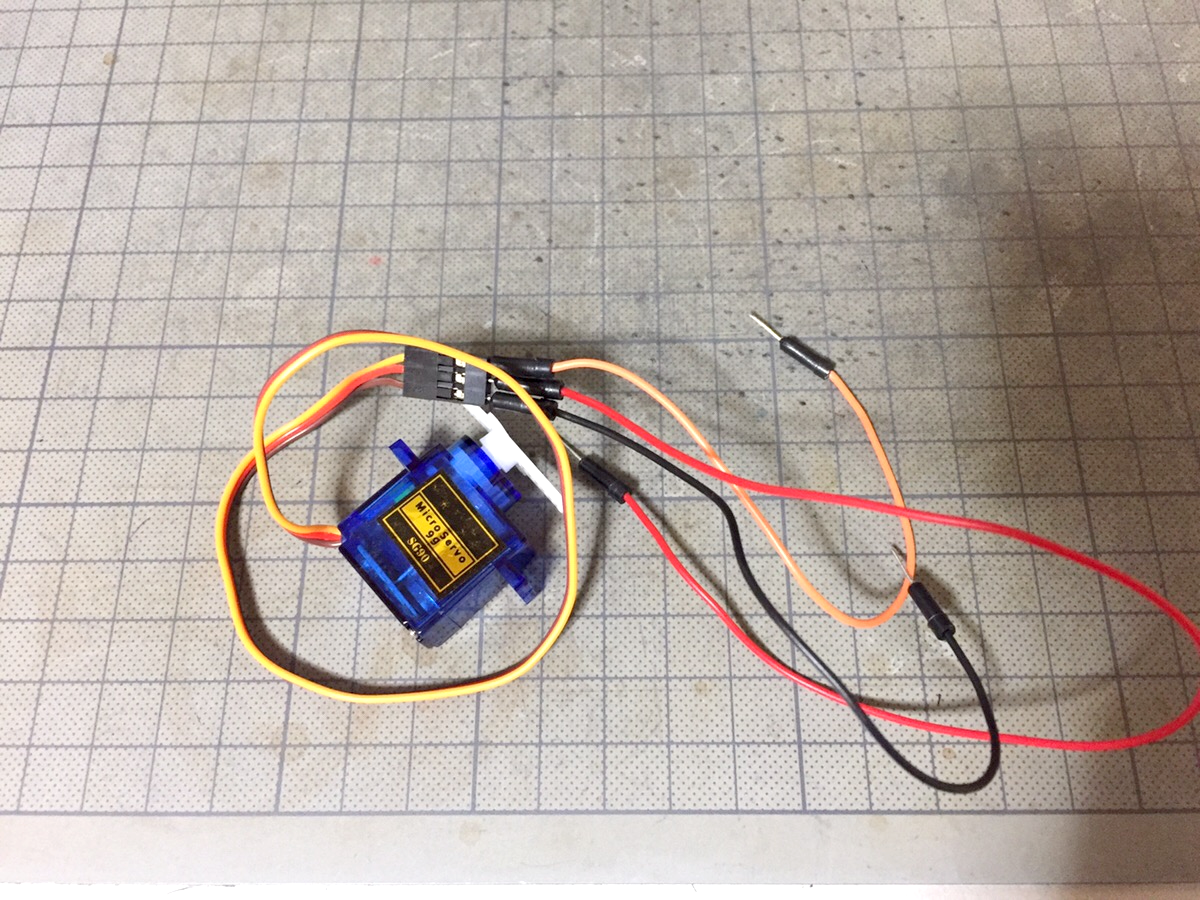
・SG90(Arduinoミニサーボモーター)、1つ(https://amzn.to/2OrX423)

本体には「Micro Servo 9g SG90」と記載されています。
・オス – オス ジャンパー線(ジャンパーワイヤ)(M-M wires (Male to Male jumper wires))、3つ(https://amzn.to/2MPDLPK)
・メスからオスのデュポンワイヤーリボンケーブル、4個(Female to Male DuPont wires)(https://amzn.to/2TtT7Jk)
それぞれ(ELEGOO Arduino用のMega2560スタータキット最終版)に付属しているものです。
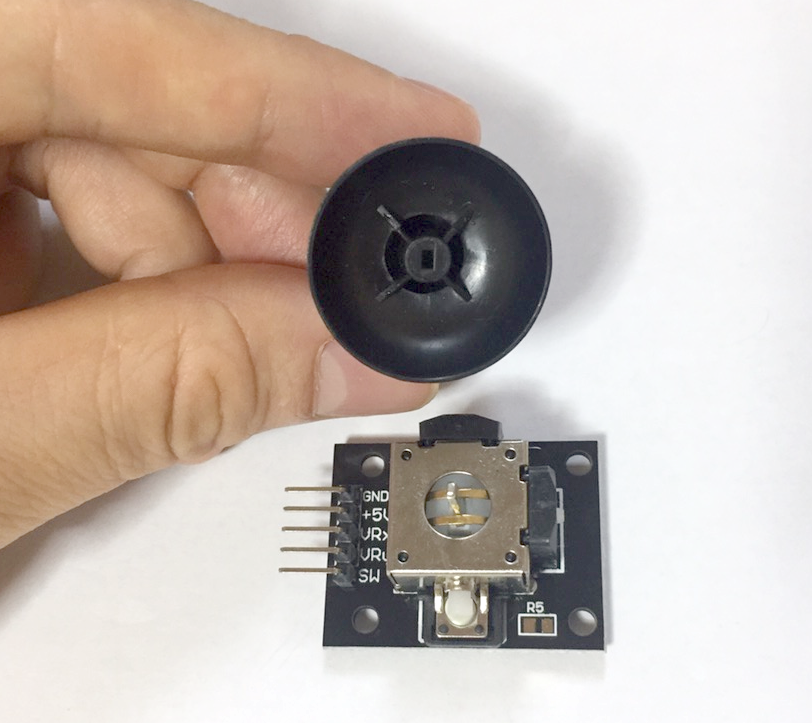
■アナログジョイスティックモジュールとメスからオスのデュポンワイヤーを接続する
それでは、アナログジョイスティックモジュールでサーボモーターの制御しますので、まずはアナログジョイスティックモジュールとメスからオスのデュポンワイヤーを接続します。
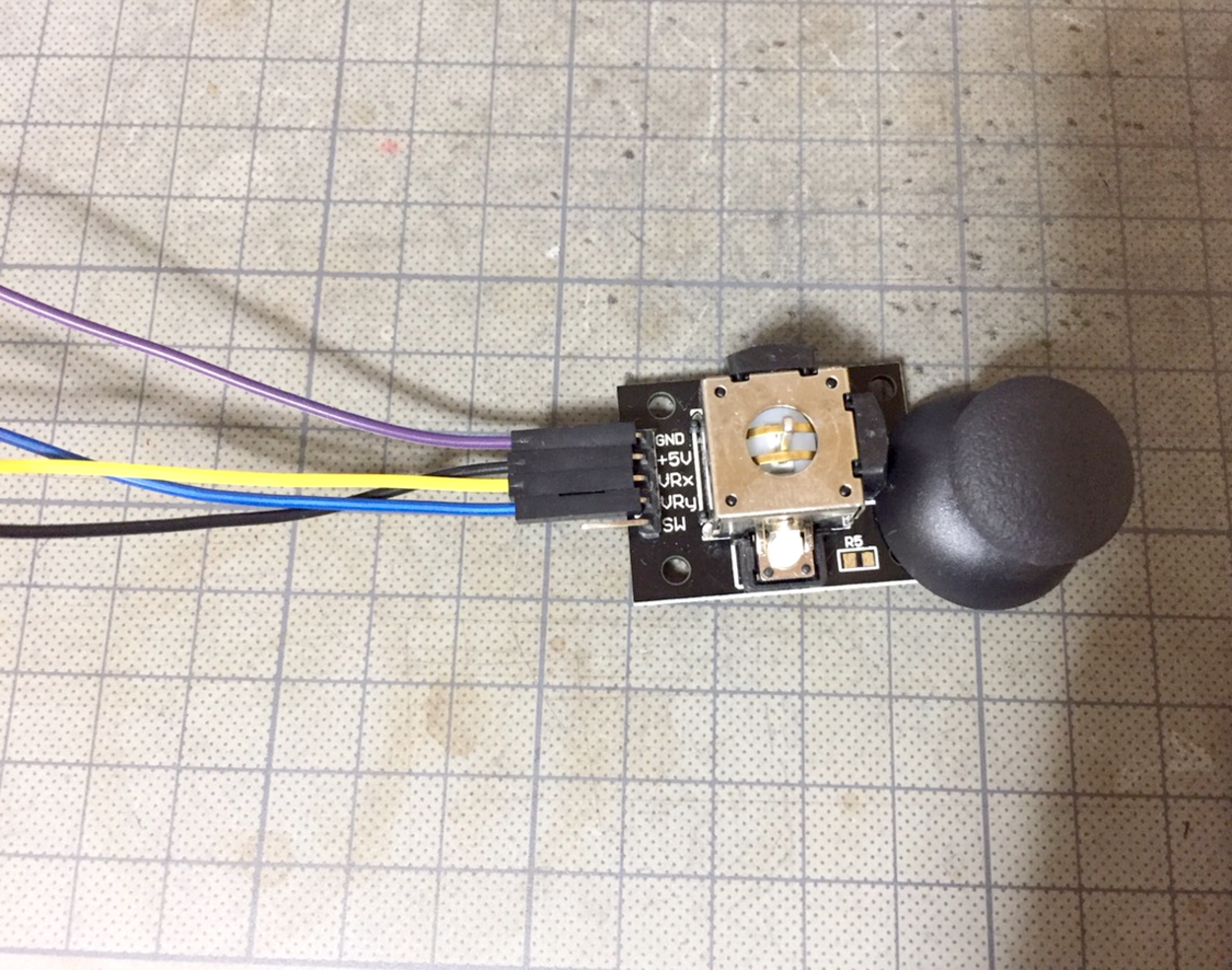
※デュポンワイヤーのオス、メスに注意する。
接続する際は、デュポンワイヤーの「メス」の方を、アナログジョイスティックモジュールのピンに差し込みます。なお、今回は「SW」と表記されているピンには、デュポンワイヤーを接続しません。
・VRx(2つのポテンショメータのワイパー端子)
・VRy(2つのポテンショメータのワイパー端子)
・+5V(電源の+ 5V)
・GND
デュポンワイヤーを接続するのは、上記の4つです。
■Elegoo MEGA2560 R3ボードとデュポンワイヤーの「オス」を接続する
アナログジョイスティックモジュールのピンに差し込んだ後は、Elegoo MEGA2560 R3ボードとデュポンワイヤーの「オス」を接続します。

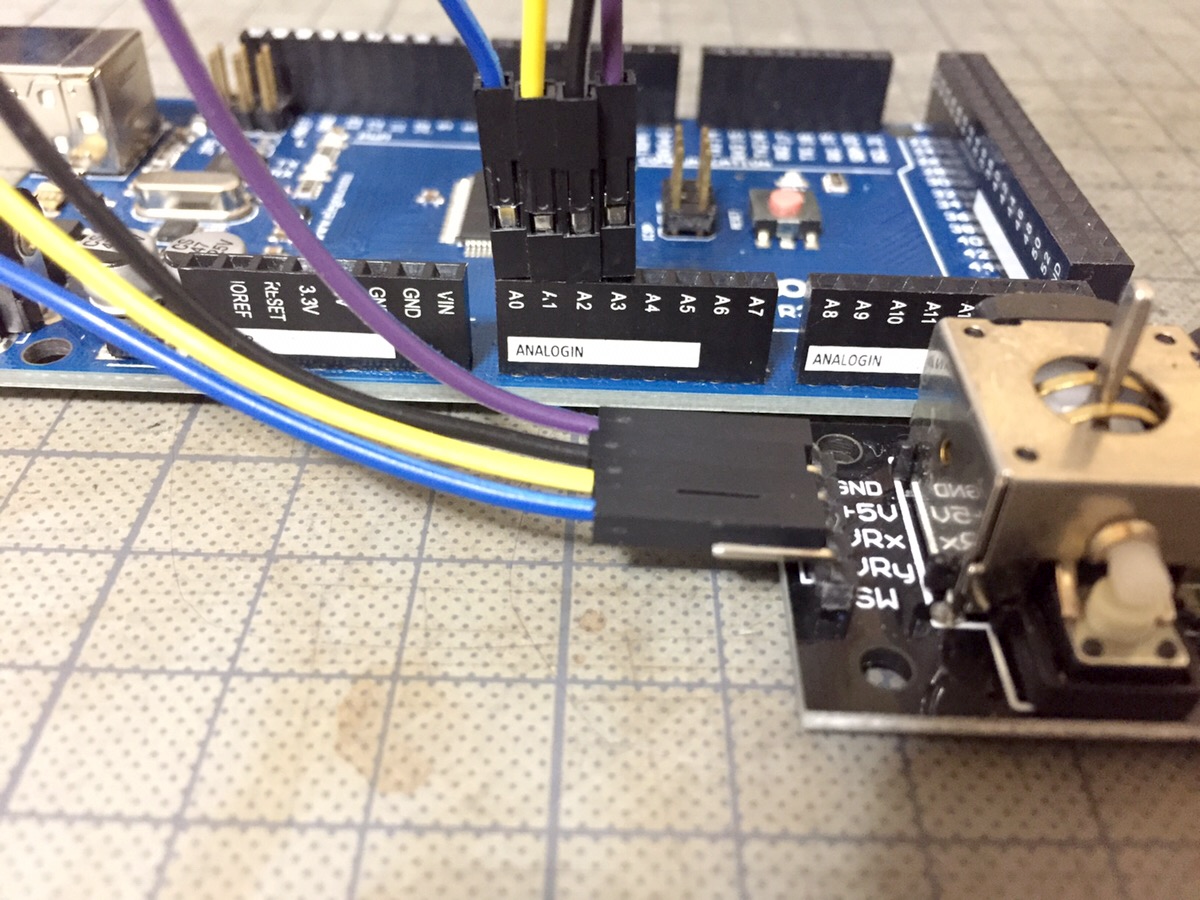

配線は上記のようになります。
■サーボモーターにオスからオスのジャンパー線を接続する
接続後、サーボモーターにオスからオスのジャンパー線を接続します。
■Elegoo MEGA2560 R3ボードとサーボモーターに繋いだオスからオスのジャンパー線を接続する
接続後、Elegoo MEGA2560 R3ボードとサーボモーターに繋いだオスからオスのジャンパー線を接続します。
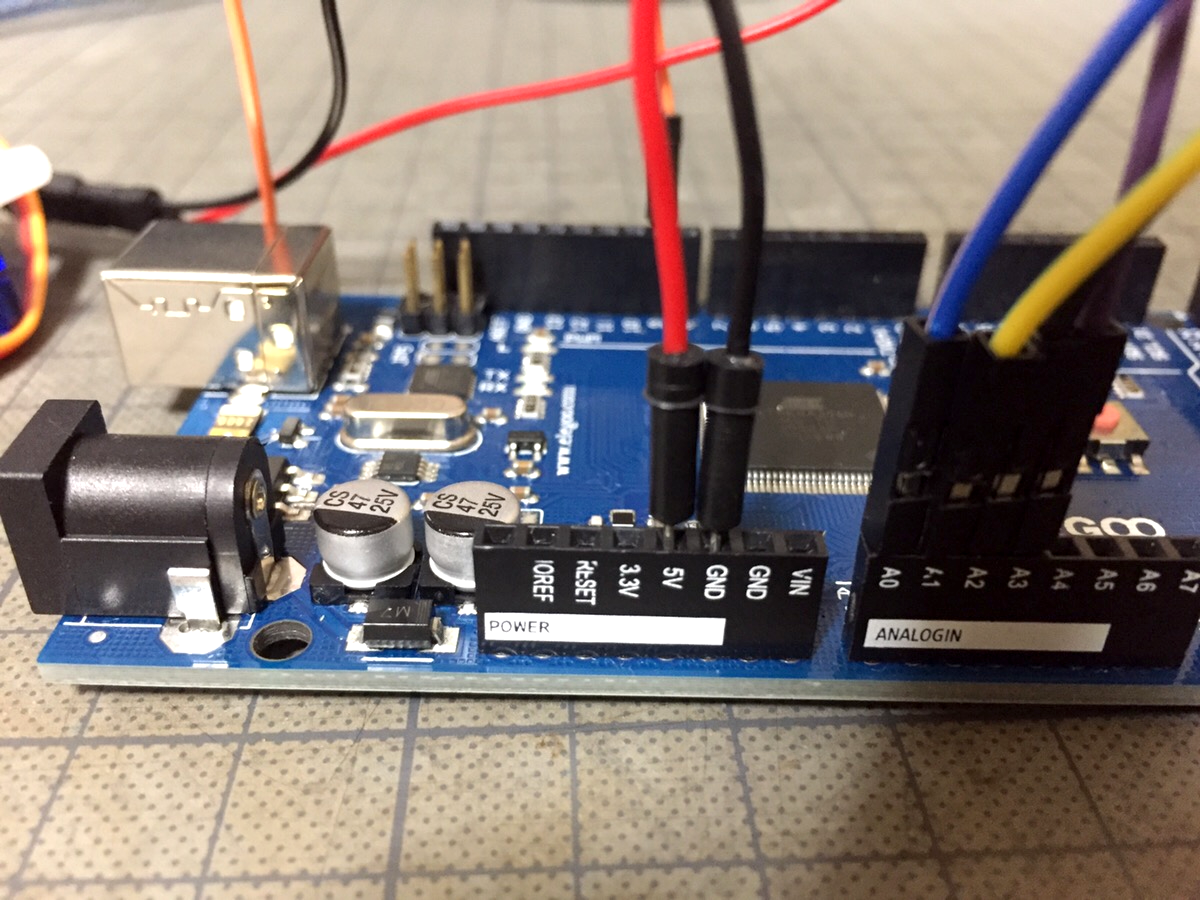


配線は上記のようになります。
■Elegoo MEGA2560 R3ボードをPC(パソコン)に接続する
接続後、Elegoo MEGA2560 R3ボードをUSBケーブルを使って、PC(パソコン)に接続する。
■新しいファイルにコードを書き、マイコンボードに書き込む
接続後、Windows10にインストールしてある「Arduino」が起動します。
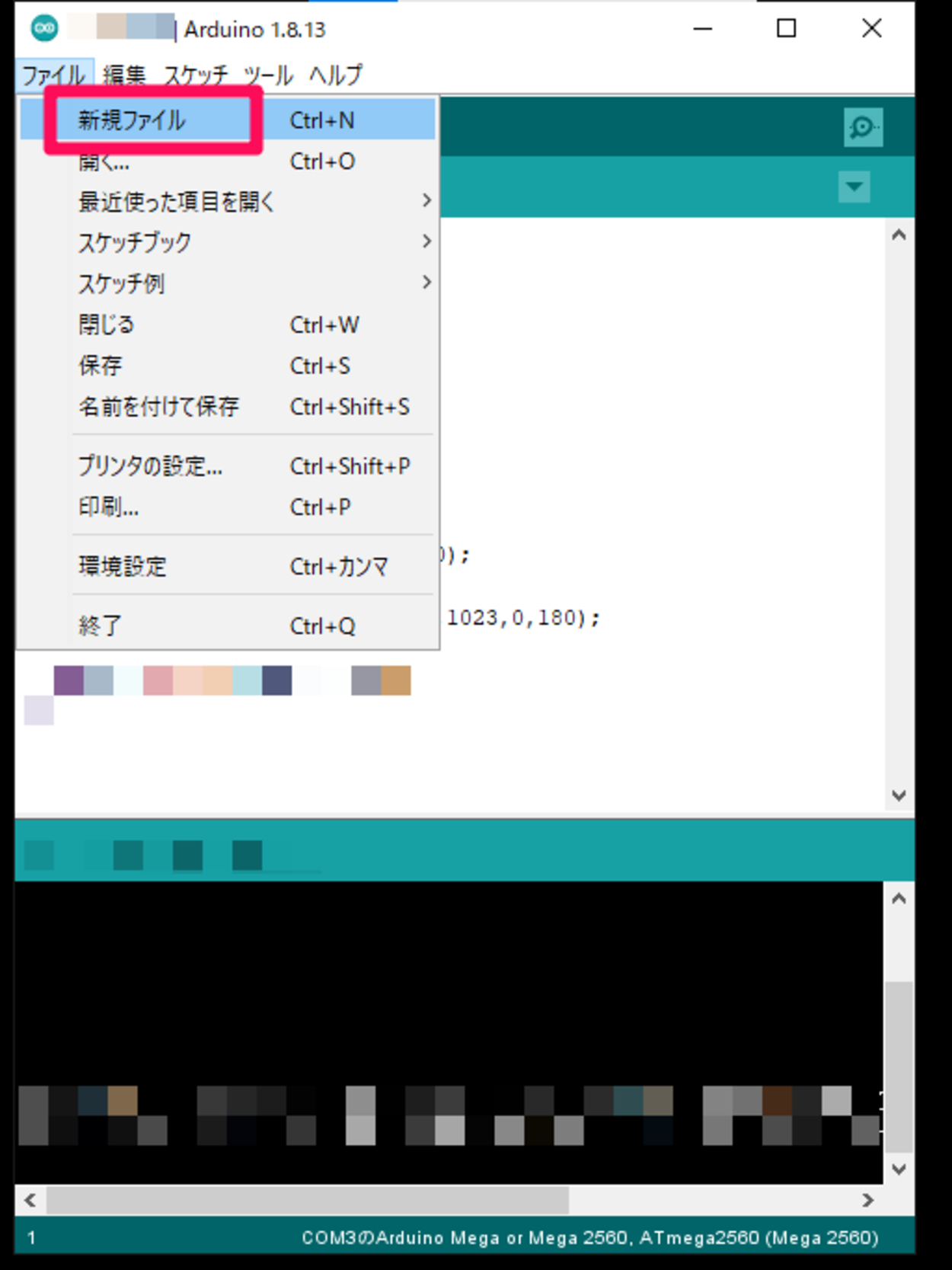
起動すると、「Arduino」のウインドウ内の「ファイル」から「新規ファイル」をクリックします。
クリックすると、新規のファイル(スケッチ)が作成されますので、ファイル(スケッチ)内にアナログジョイスティックモジュールでサーボモーターの制御のコードを書いていきます。
■コード
今回は、こちらのプロジェクトのコードを使わせていただきます(https://create.arduino.cc/projecthub/RiddledExistence/controlling-a-servo-motor-with-thumb-joystick-46a4d3)。
このコードは、“Servo”というライブラリが必要となります。
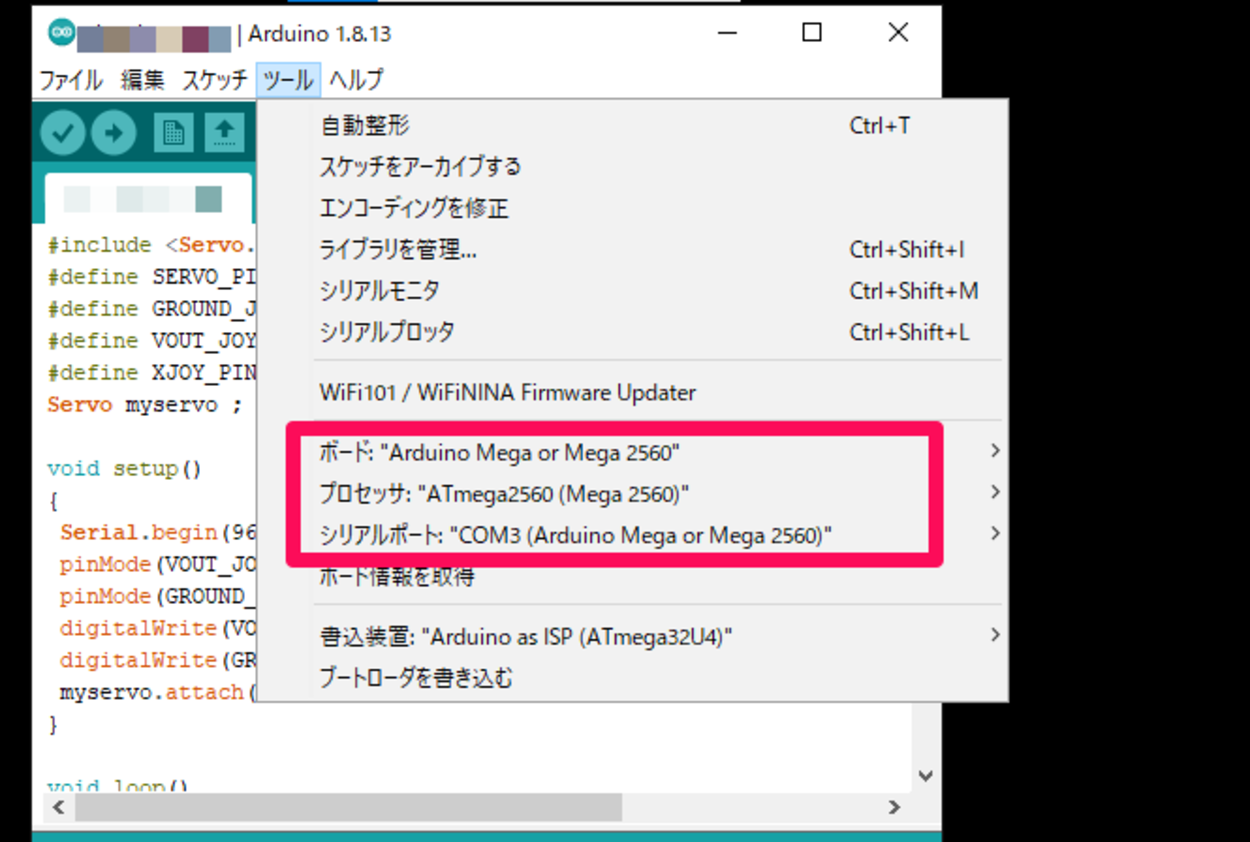
書き込む前に、「Arduino」ウインドウ内の「ツール」をクリックし、「ボード」、「プロセッサ」、「シリアルポート」が、「MEGA2560」と表示されてWindows10に認識されているかを確認します。
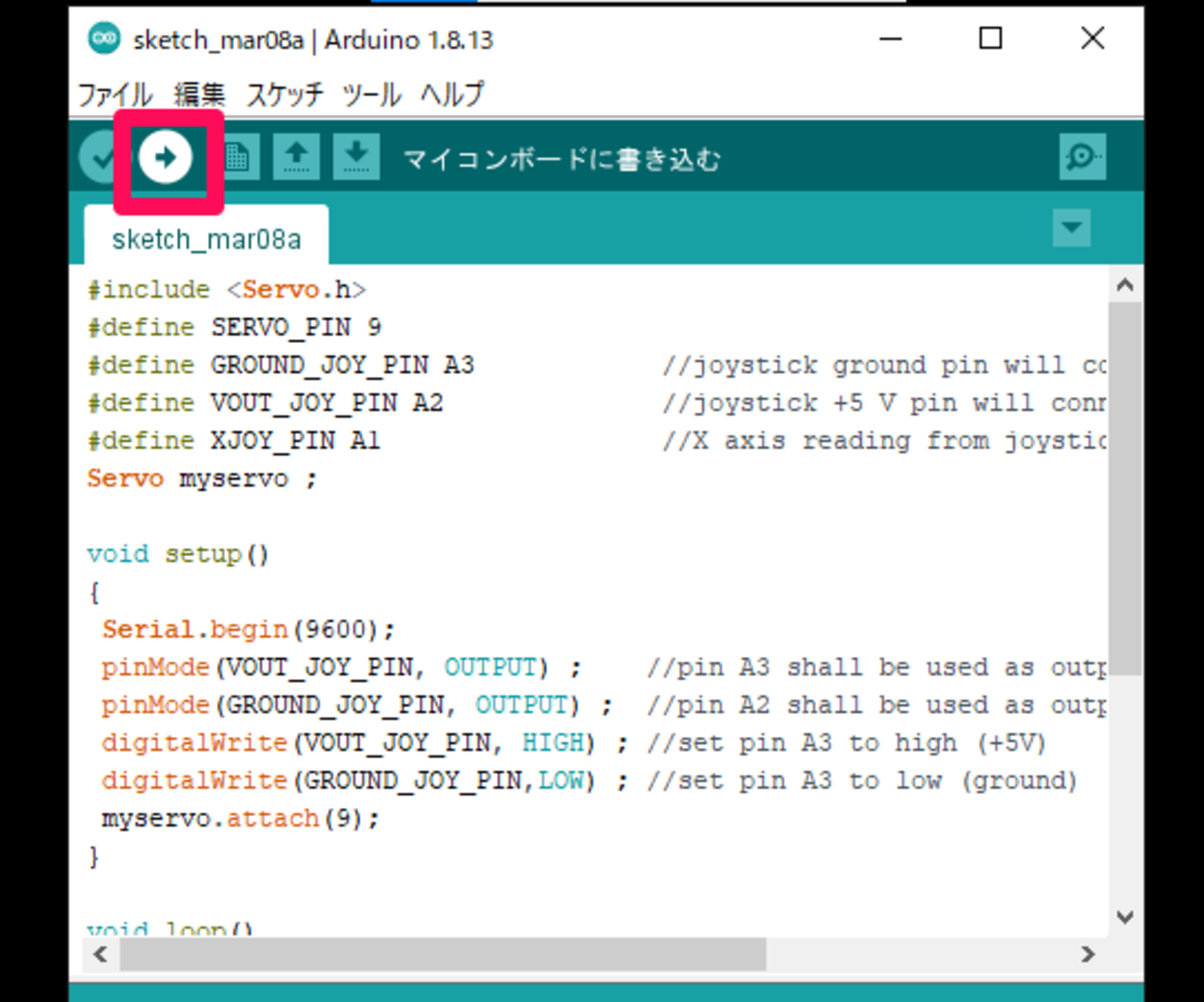
確認後、「Arduino」ウインドウ内の上部にある「マイコンボードに書き込む・書込装置を使って書き込み」ボタンをクリックします。

クリックすると、Elegoo MEGA2560 R3ボードにファイル(スケッチ)が書き込まれ、「Arduino」ウインドウ内の下に「ボードへの書き込みが完了しました。」と表示されます。これで書き込みは完了となります。
■アナログジョイスティックモジュールによるサーボモーターの制御ができたのか検証
書き込み後、アナログジョイスティックモジュールによるサーボモーターの制御ができたのかの検証を行いました。
検証を行いましたが、アナログジョイスティックモジュールを動かすと、それに連動してサーボモーターが動くことを確認できました。
コメント