obniz Boardに接続したポテンショメーターでRC サーボモーターを操作してみます。
■用意したもの
・obniz Board
・RC サーボモーター(ServoMotor)

・Micro USBケーブル
これらは「obniz Starter kit(オブナイズ スターターキット)」に付属しています。
別途用意したもの
・Windows10を搭載したノートパソコン(オンラインのプログラムエディタを開くため)
・インターネット環境、WiMAX(ワイマックス)。
・ポテンショメーター(Potentiometer) (10k)、1個(https://amzn.to/3mamNZj)
・BREADBOARD(ブレットボード)、1個(https://amzn.to/2FufpH9)
・ジャンパーワイヤー(ジャンパー線)オス-オス、3本(https://amzn.to/3m9rYZj)
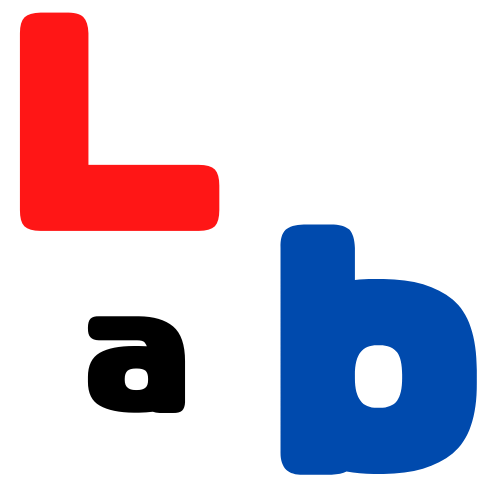
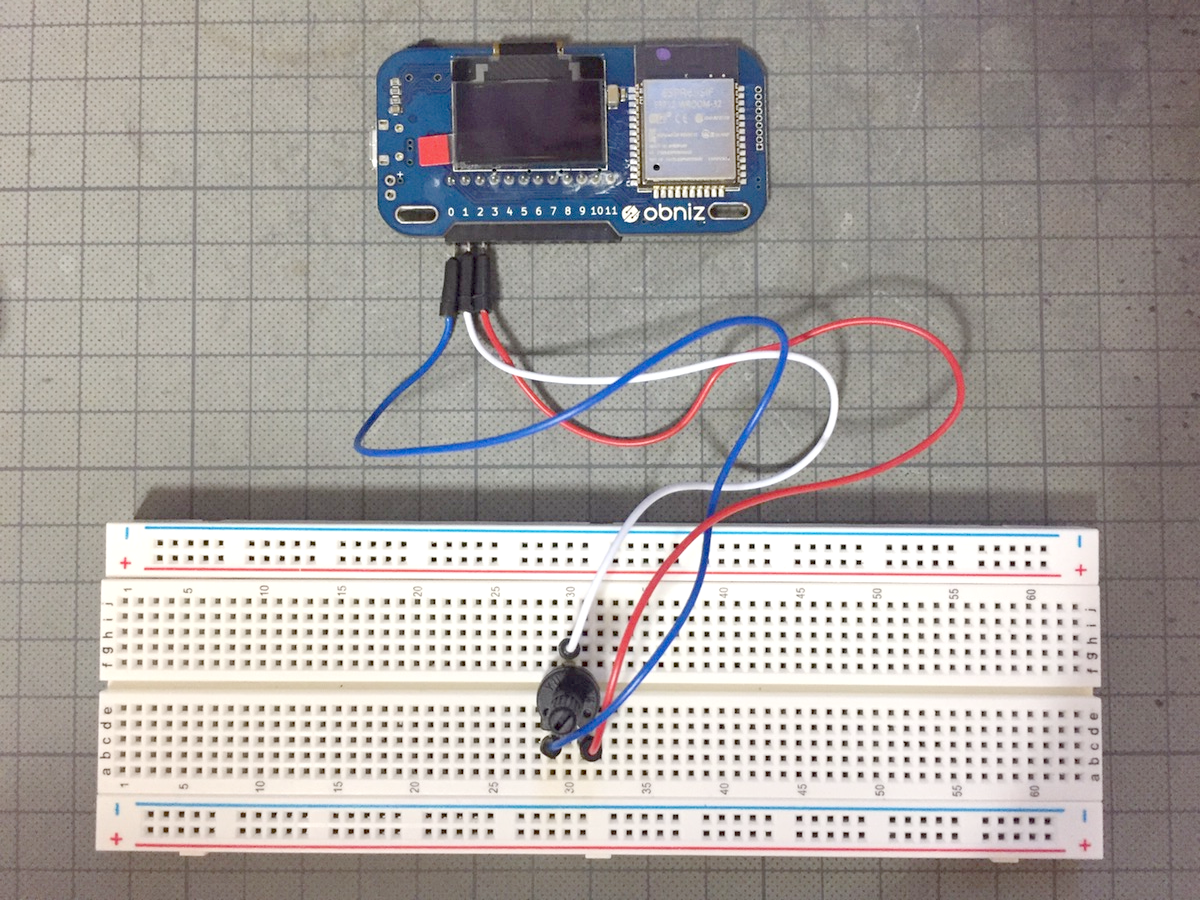
■ブレッドボードにポテンショメーターを接続する
obniz Boardに接続したポテンショメーターでRC サーボモーターを操作してみますので、まずブレッドボードにポテンショメーターを接続します。
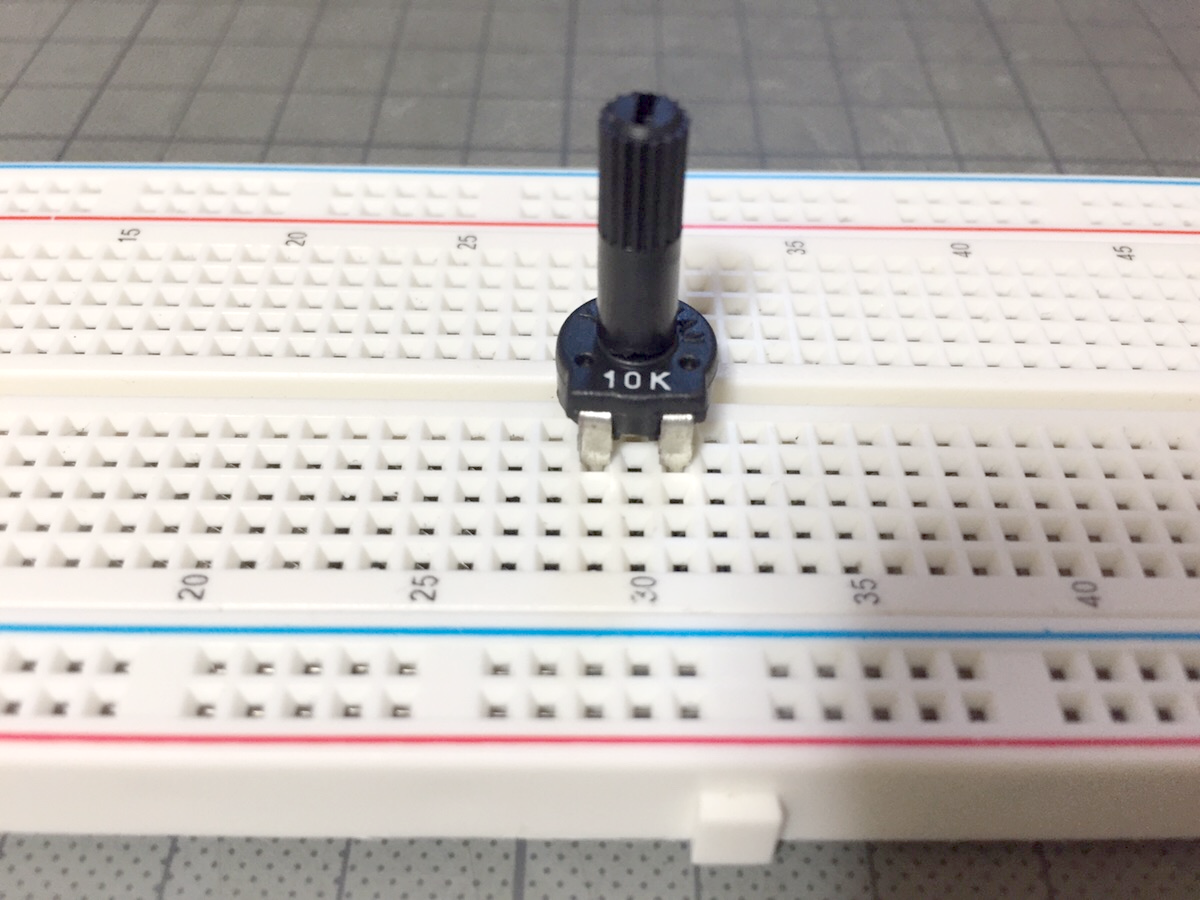
ブレッドボードにポテンショメーターを接続した後は、ジャンパーワイヤー(ジャンパー線)オス-オスをブレッドボードに差し込みます。差し込む場合は、ポテンショメーターのピンの位置を確認しながら差し込みます。
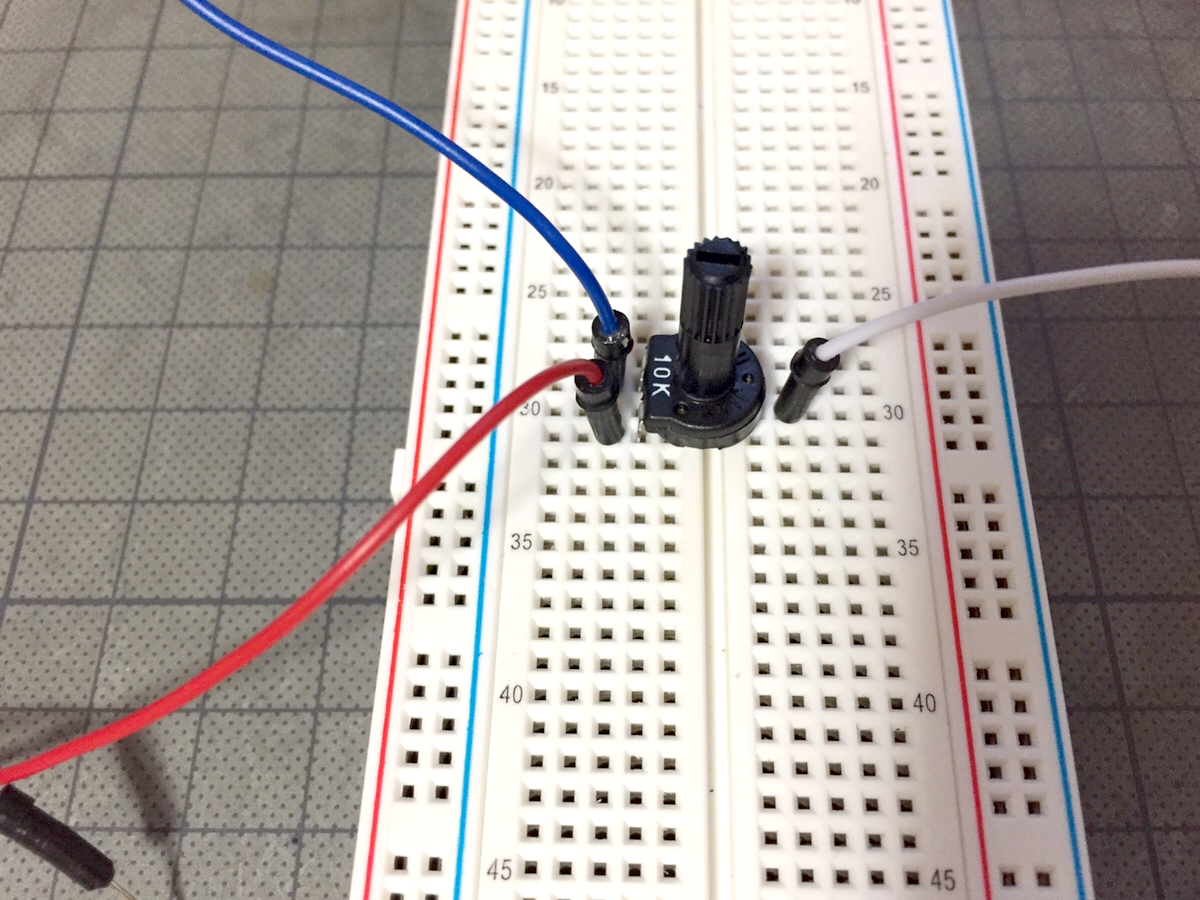
■ジャンパーワイヤー(ジャンパー線)をobniz Boardに接続します。
差し込んだ後は、ジャンパーワイヤー(ジャンパー線)をobniz Boardに差し込みます。
差し込んだ後は、ジャンパーワイヤー(ジャンパー線)をobniz Boardに差し込みます。この時、配線を間違ってしまうと、obniz Board本体の電源が突然切れてしまう、今回用意したパソコンでobniz Boardが認識できなくなってしまうなどのトラブルが発生します。(体験談)
■RC サーボモーターをobniz Boardに接続する
差し込み後、RC サーボモーターをobniz Boardに接続します。

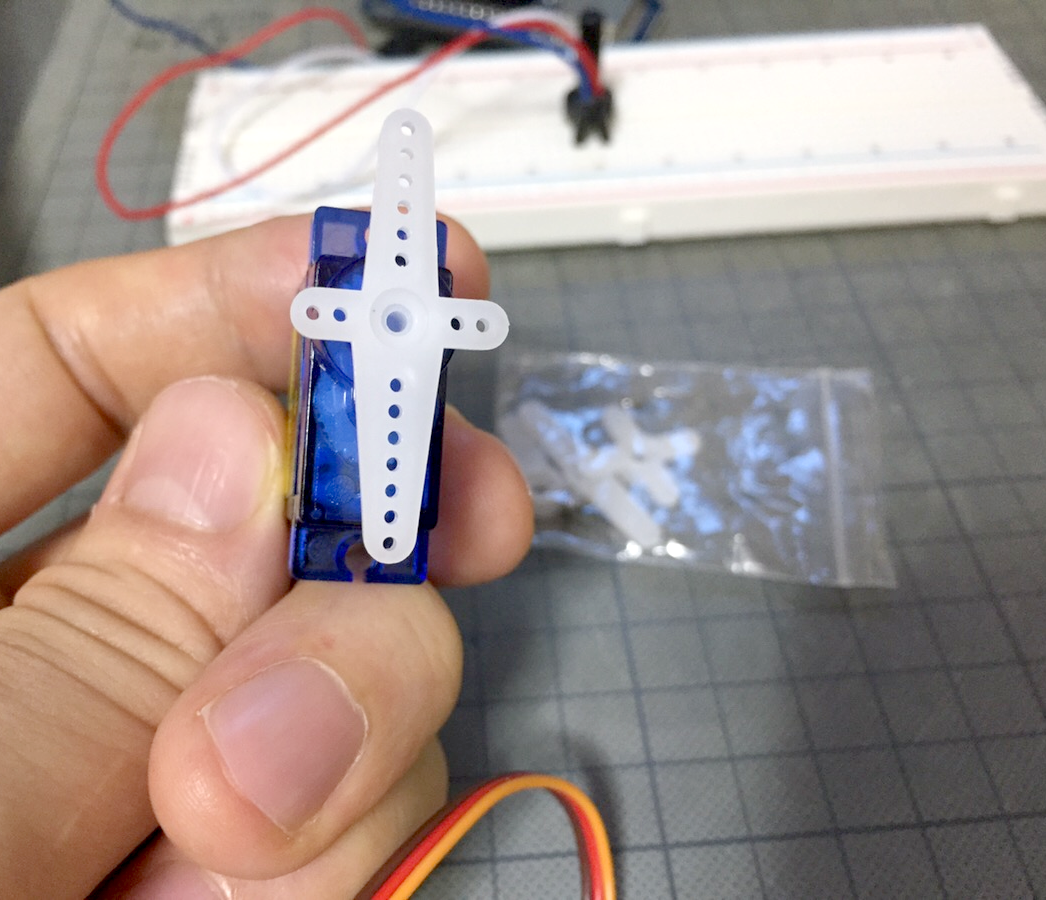
RC サーボモーターにパーツを取り付けます。
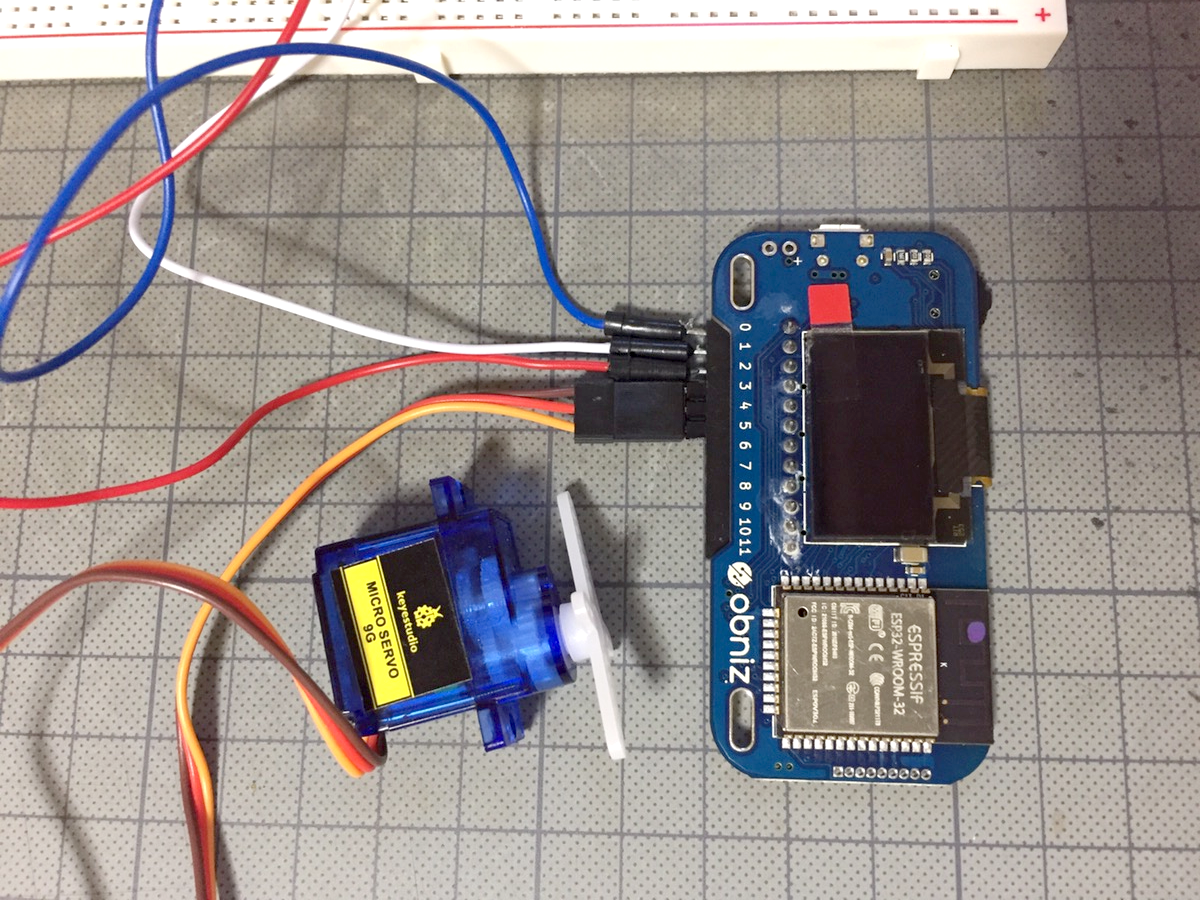
obniz Board本体に記載された数字と、RCサーボモーターの線の色を確認しておきます。
■obniz Boardをノートパソコンに接続する。
差し込んだ後は、obniz Board本体をUSBケーブルを使い、ノートパソコンへ接続します。
■デベロッパーのコンソールにアクセスし、プログラムを作る。
接続後、「obniz – developer’s console(http://obniz.com/ja/console/program)」にアクセスします。アクセス後、オンラインのプログラムエディタでプログラムを作っていきます。
「obniz Boardに接続したポテンショメーターを使用する」という記事を公開しましたが、少しコードの追加・変更することでプログラムが作れます。
■コード
「obniz.wired(“Potentiometer”, { pin0: 0, pin1: 1, pin2: 2 });」がポテンションメーターの部分で、「obniz.wired(“ServoMotor”, { gnd: 3, vcc: 4, signal: 5 });」がサーボモーターの部分になるので、それぞれ差し込んだジャンパーワイヤー(ジャンパー線)を確認しながら数字を記述します。
■RC サーボモーターを操作できるのか検証・確認
今回のプログラムを実行し、実行に角度が取得できるのかの検証・確認を行いました。
検証・確認を行いましたが、ポテンショメーターのノブを回転させると、それにあわせてサーボモーターが回転することを確認できました。
コメント