Arduino Elegoo MEGA2560 R3ボードとULN2003ステッピングモーター(ステッパーモーター)ドライバーモジュール等を使用してステッピングモーターを操作してみます。
- ■用意したもの
- ■ステッピングモーターへの理解
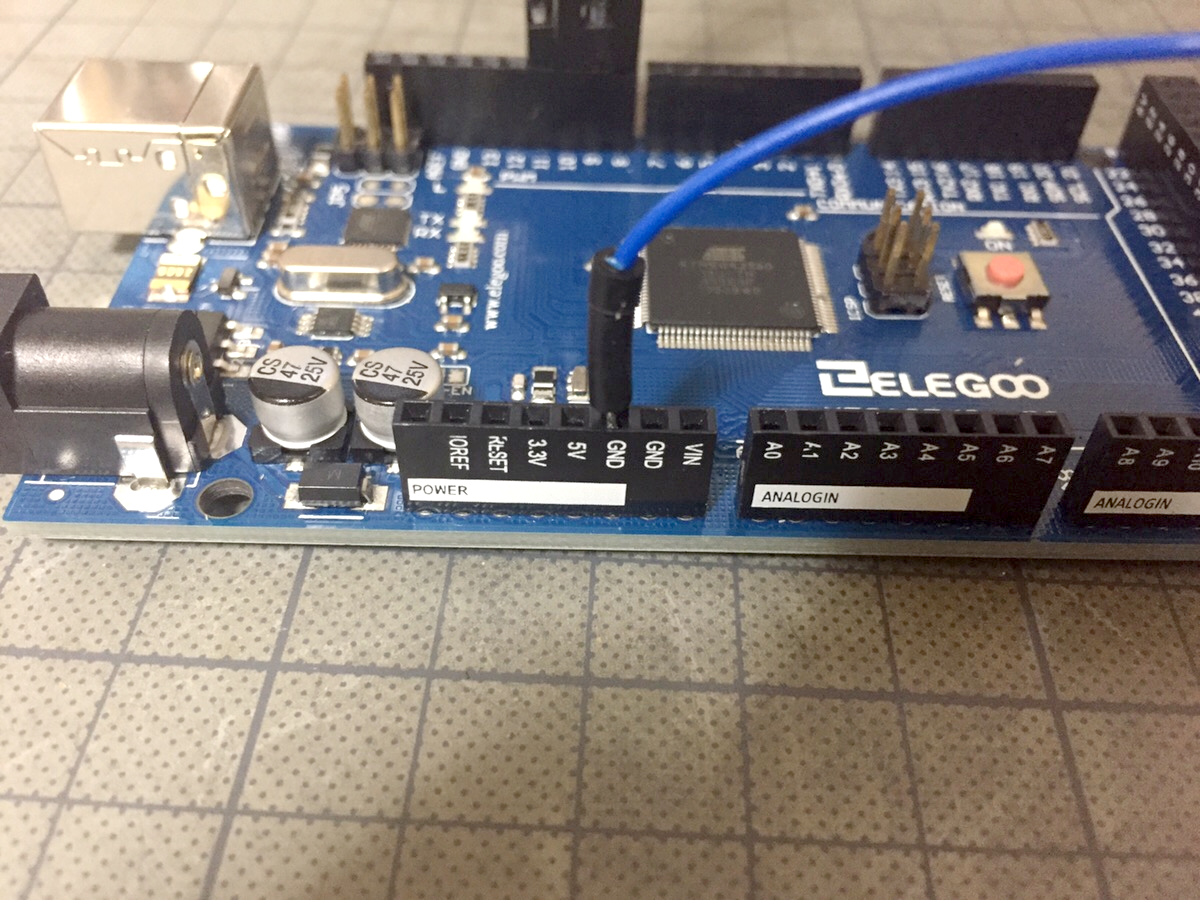
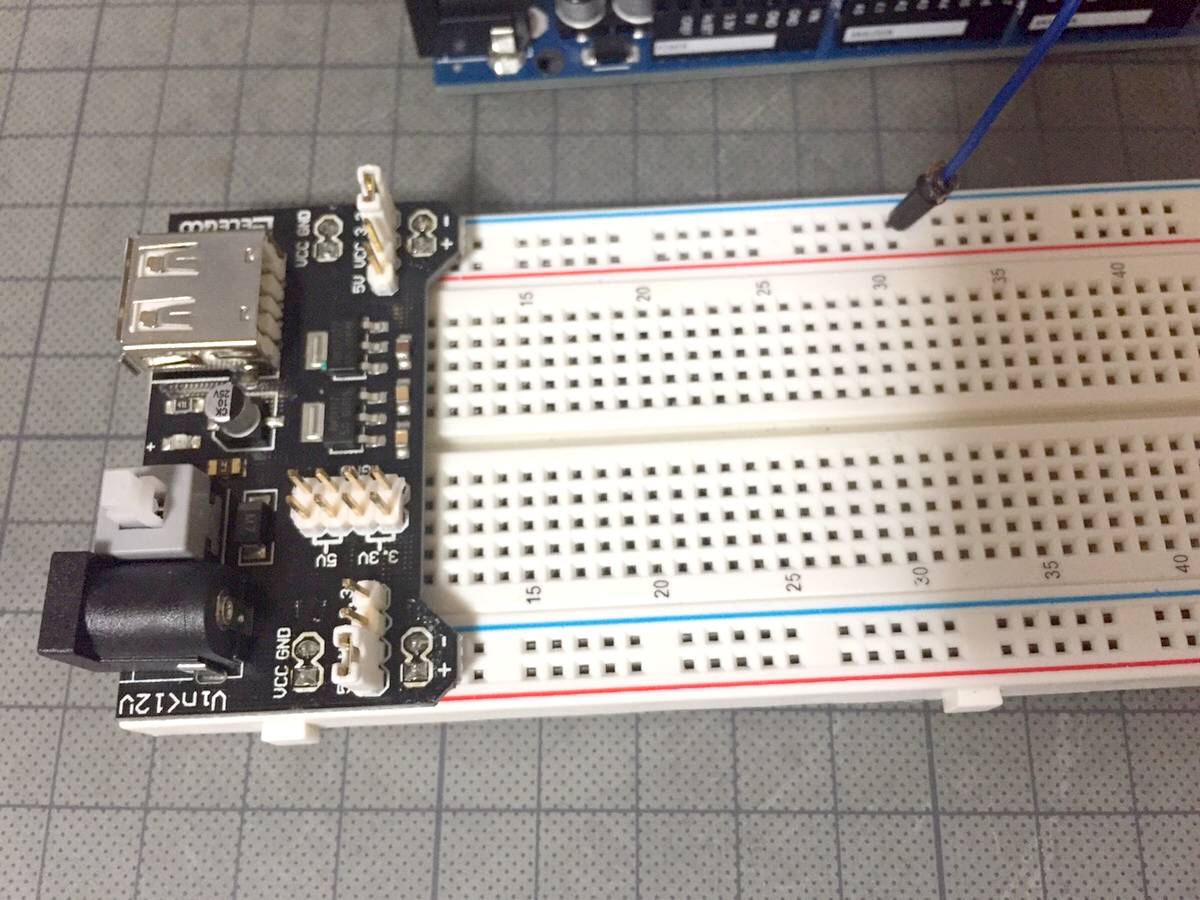
- ■ブレッドボードに、ブレッドボード用電源モジュールを接続する
- ■ブレッドボードと、ULN2003 ステッパーモータードライバーモジュールを接続する
- ■ULN2003 ステッピングモータードライバーモジュールと、ステッパーモーターを接続する
- ■ULN2003 ステッピングモータードライバーモジュールと、MEGA2560 R3ボードを接続する
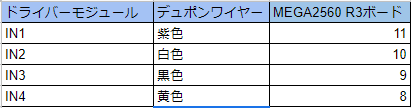
- ■ブレッドボードと、MEGA2560 R3ボードを接続する
- ■MEGA2560 R3ボードをPC(パソコン)に接続する
- ■ブレッドボード用電源モジュールにACアダプターを取り付ける
- ■コードをアップロードし、マイコンボードに書き込む
- ■ステッピングモーターを操作できたのかの検証
■用意したもの
・Arduinoバージョン1.8.13がインストールされているPC(Windows10)
・Elegoo MEGA2560 R3ボード、1個(https://amzn.to/2TCxAP3)

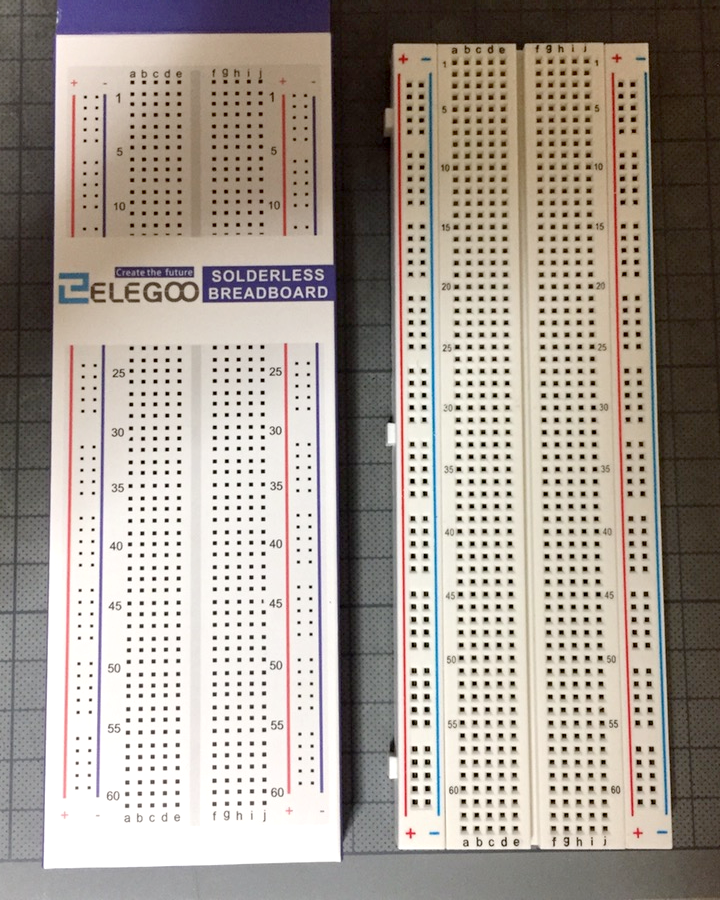
・BREADBOARD(ブレットボード) MB-102、1個(https://amzn.to/37HDcQg)
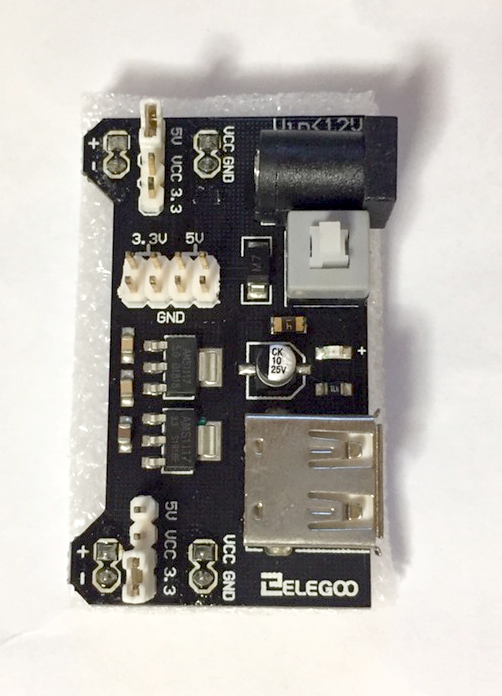
・ブレッドボード用電源モジュール(Breadboard Power Supply)、1個(https://amzn.to/3mj0yzF)
・ステッピングモーター(ステッパーモーター)(Stepper motor)、1個(https://amzn.to/3dYAyGY)


・ULN2003 ステッピングモーター(ステッパーモーター)ドライバーモジュール(stepper motor drivermodule)、1個(https://amzn.to/3dYAyGY)

・ACアダプター 9V 1A、1個(https://amzn.to/2TqhYxS)

・メスからオスのデュポンワイヤーリボンケーブル(Female to Male DuPont wires)、6つ(https://amzn.to/2HEhTDV)
・オス – オス ジャンパー線(ジャンパーワイヤ)(M-M wires (Male to Male jumper wires))、1つ(https://amzn.to/3mmdSDd)
それぞれ(ELEGOO Arduino用のMega2560スタータキット最終版)に付属しているものです。
■ステッピングモーターへの理解
ステッピングモーター(ステッパーモーター)は、電気パルスを個別の機械的動作に変換する電気機械的装置。1回転を複数のステップに分割する。ステッパーモーターは、12、24、72、144、180、および200の回転あたりのステップで製造されており、ステップあたりの角度は30、15、5、2.5、2、および1.8度となります。
ステッピングモーターの最も重要な利点は、開ループ制御で正確に制
御できることです。開ループ制御は、位置に関するフィードバック情報が必要でないことを意味しています。モーターを完全に制御できるため、モーターを正確な位置に移動してその位置を保持できます。保持できる理由は、モーター内部のコイルに非常に短い時間だけ電力を供給しているからです。逆に言えば、モーターを希望の位置に保持するためには、常にモーターに電力を供給する必要があります。
なお、ステッピングモーターを動かすには、特定の数のステップを一方向または他方向に動かすようにこちらで制御し、その方向に進む速度を伝える必要があります。
■ブレッドボードに、ブレッドボード用電源モジュールを接続する
それでは、MEGA2560 R3ボードとULN2003ステッピングモータードライバーモジュール等を使用してステッピングモーターを操作してみますので、まずブレッドボードに、ブレッドボード用電源モジュールを接続します。
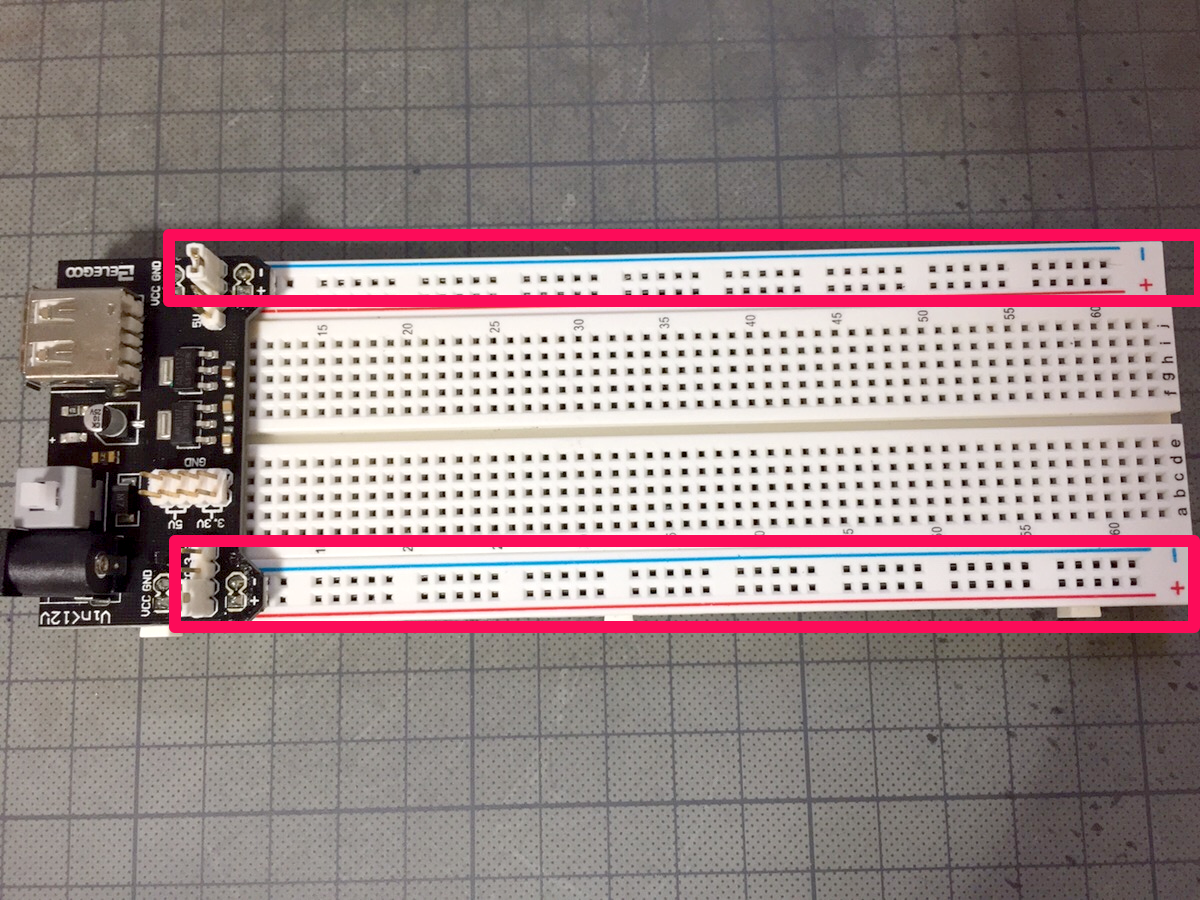
接続する際は、ブレッドボードに記載されている「+」と「-」が、ブレッドボード用電源モジュールに記載されている「+」と「-」がそろうように接続します。
■ブレッドボードと、ULN2003 ステッパーモータードライバーモジュールを接続する
接続後、ブレッドボードと、ULN2003 ステッピングモータードライバーモジュールを接続します。
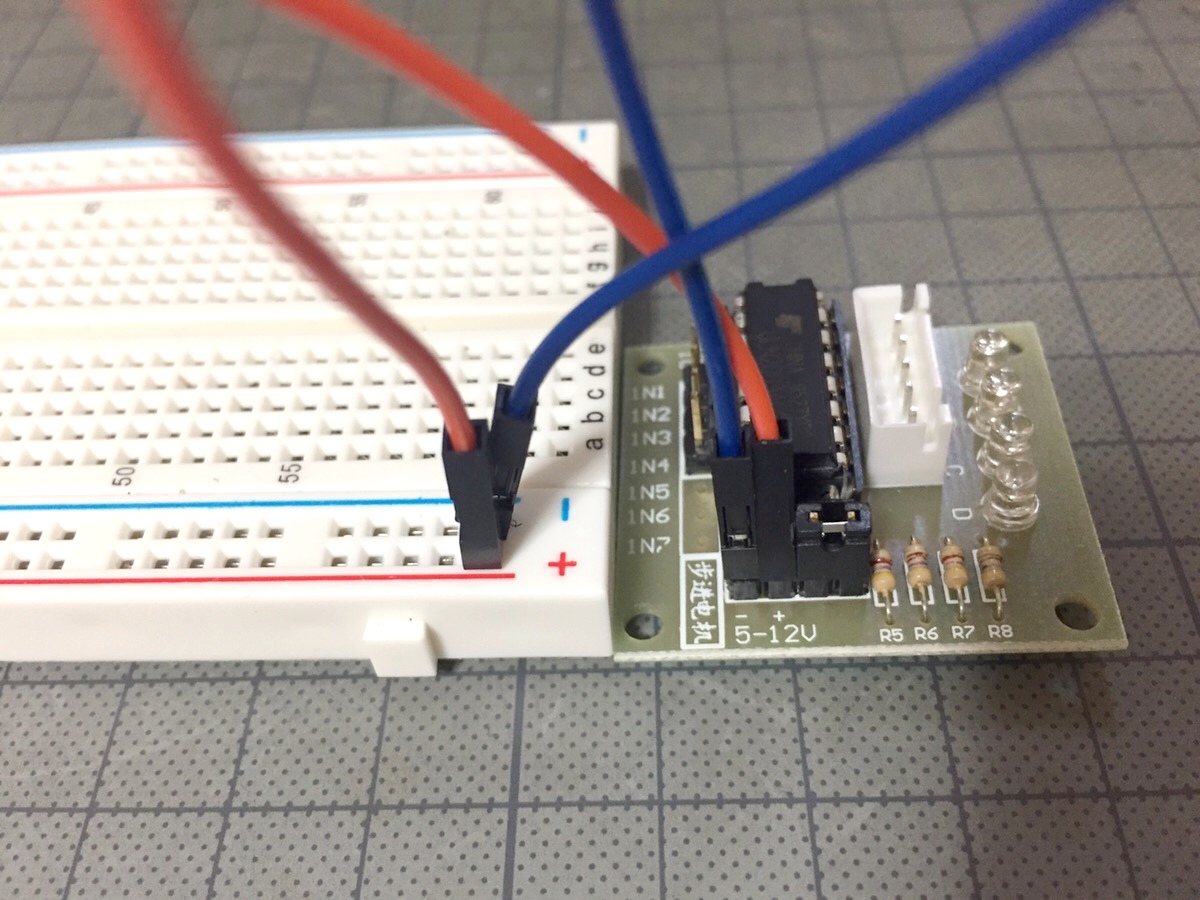
ブレッドボードに記載されている「+」と「-」、モジュールに記載されている「+」、「-」が合わさるように接続します。
■ULN2003 ステッピングモータードライバーモジュールと、ステッパーモーターを接続する
接続後、ULN2003 ステッピングモータードライバーモジュールと、ステッピングモーターモーターを接続します。
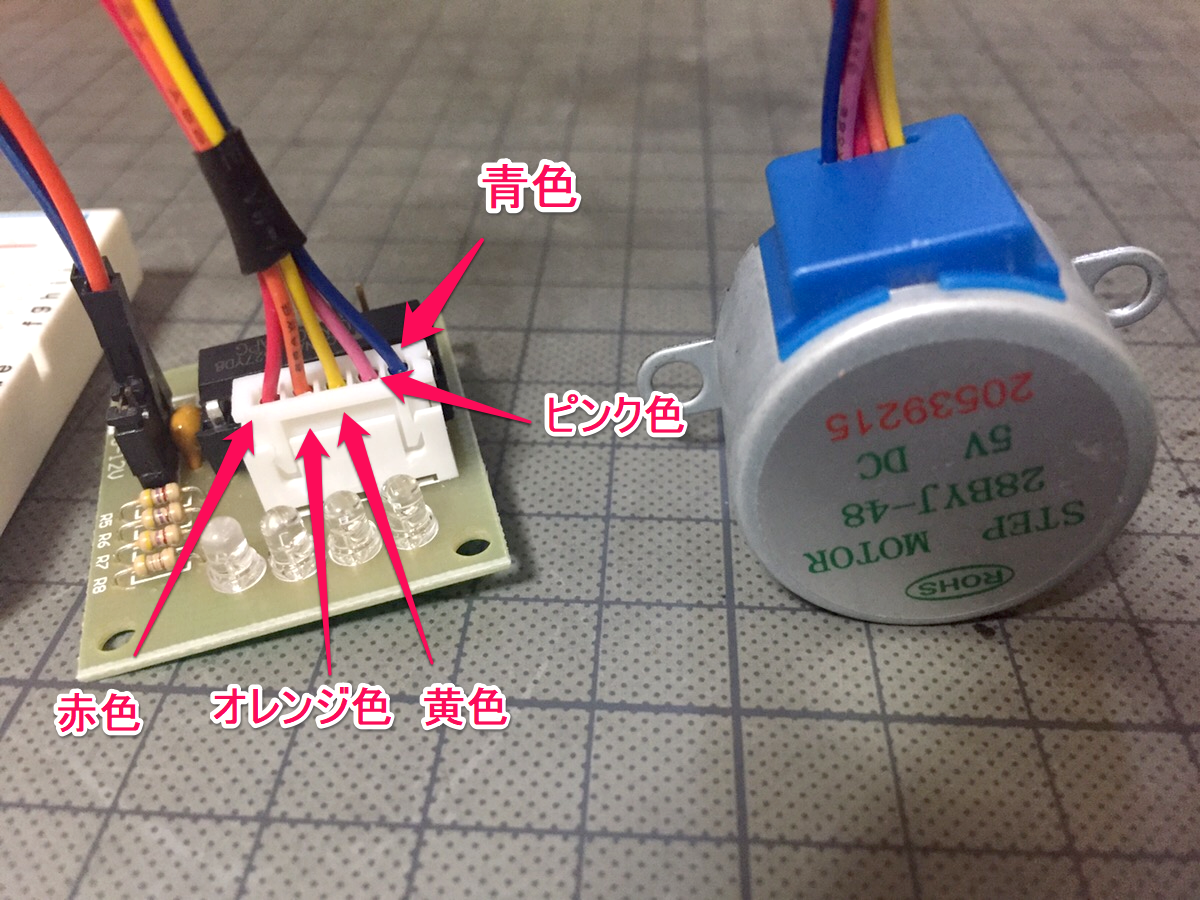
配線を間違えないようにします。
■ULN2003 ステッピングモータードライバーモジュールと、MEGA2560 R3ボードを接続する
接続後、ULN2003 ステッピングモータードライバーモジュールと、MEGA2560 R3ボードを接続します。
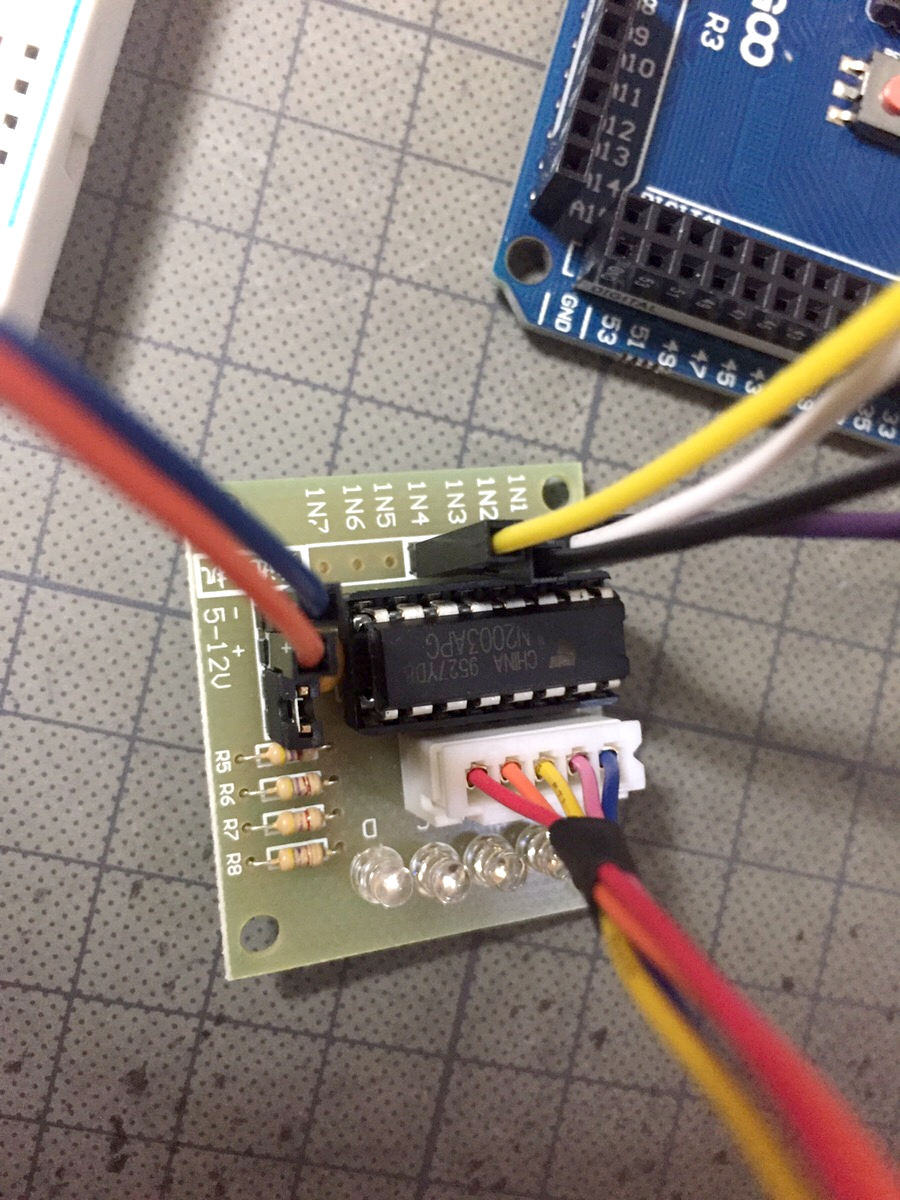
配線を間違えないようにします。
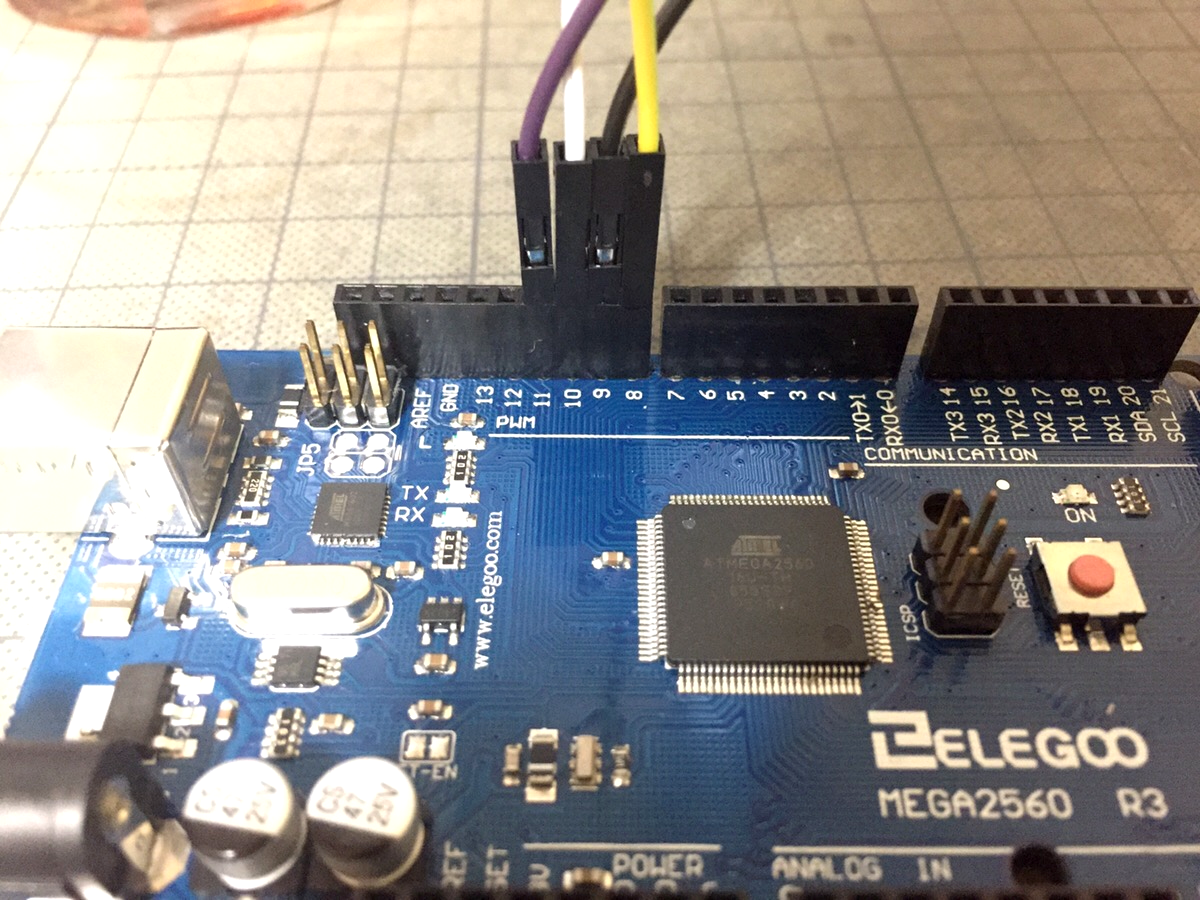
■ブレッドボードと、MEGA2560 R3ボードを接続する
接続後、ブレッドボードと、MEGA2560 R3ボードを接続します。
配線を間違えないようにします。
■MEGA2560 R3ボードをPC(パソコン)に接続する
接続後、MEGA2560 R3ボードをUSBケーブルを使って、PC(パソコン)に接続する。
■ブレッドボード用電源モジュールにACアダプターを取り付ける
接続後、ブレッドボード用電源モジュールにACアダプターを取り付けます。
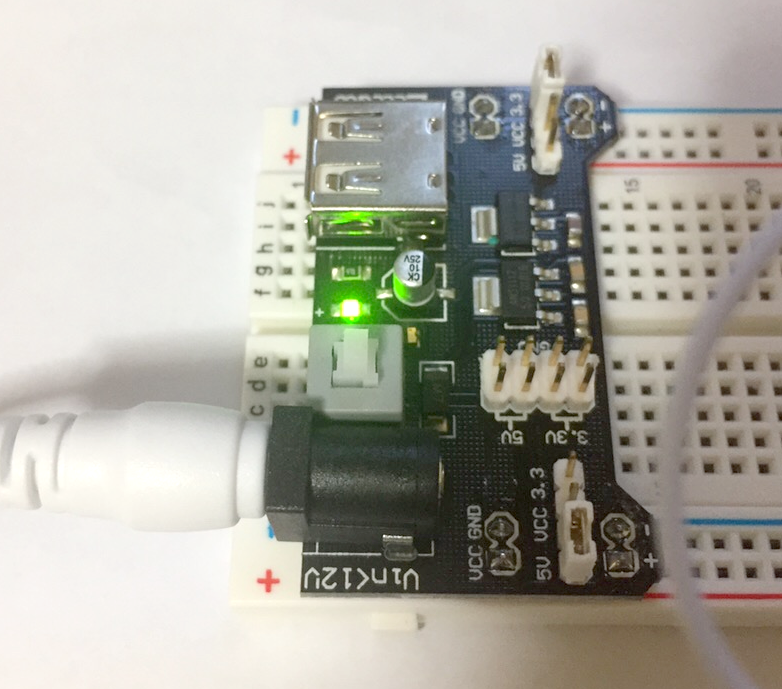
接続すると、モジュール本体の緑色LEDが点灯します。
■コードをアップロードし、マイコンボードに書き込む
接続後、ELEGOO Arduino用のMega2560スタータキット最終版に付属したCD-ROMをパソコンで読み取ります。
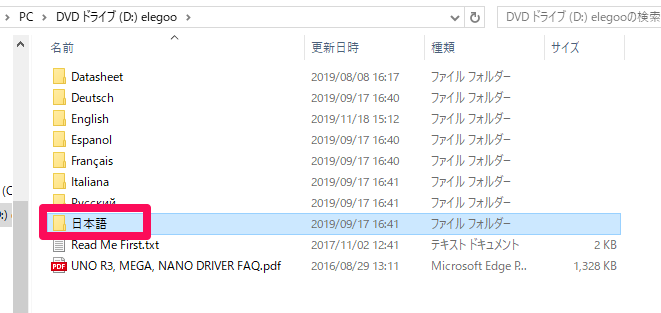
CD-ROMから「日本語」をクリックする。
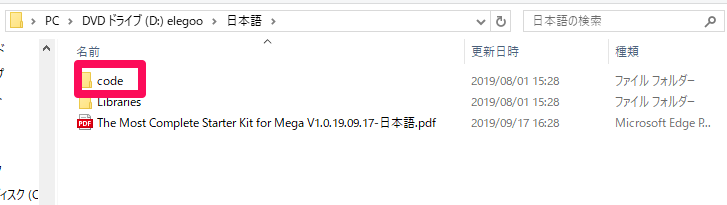
「code」をクリックする。

「Lesson 31 Stepper Motor」をクリックする。
「stepper_Example」をクリックする。
「stepper_Example.ino」をクリックする。
クリックすると、「Arduino」が起動し、ウインドウ内に「stepper_Example」のコードが表示されます。
このコードをMEGA2560 R3ボードに書き込んでみたいと思いますが、このままコードを書き込んでしまうとエラーになってしまうので、ライブラリを追加する必要があります。

ライブラリを追加するには、CD-ROMの「Lesson 31 Stepper Motor」の中にある「Stepper.zip」というファイルを、コピーし、Windows10のローカル上に保存します。
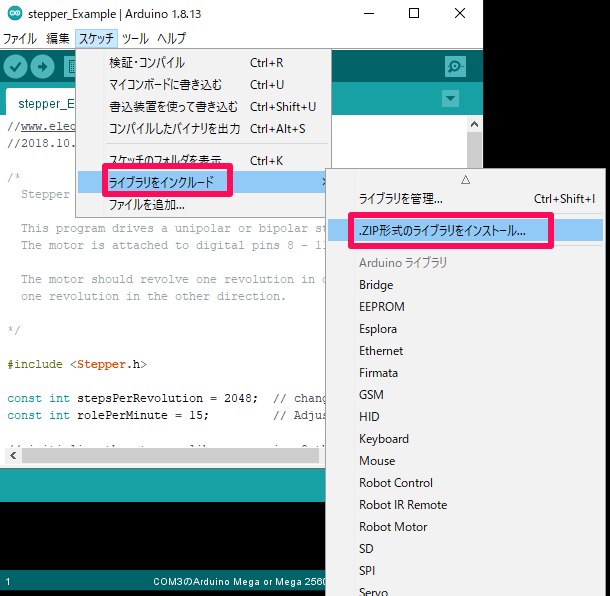
保存後、「Arduino」のウインドウ上部にある「スケッチ」をクリックします。プルダウンメニューが表示されますので「ライブラリをインクルード」をクリックします。さらにメニューが表示されますので、「.ZIP形式のライブラリをインストール」をクリックします。
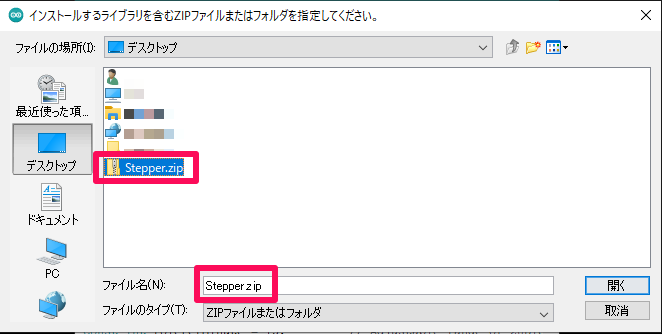
クリックすると「インストールするライブラリを含むZIPファイルまたはフォルダを指定してください。」というウインドウが表示されますので、「Stepper.zip」を選択し、「開く」ボタンをクリックします。
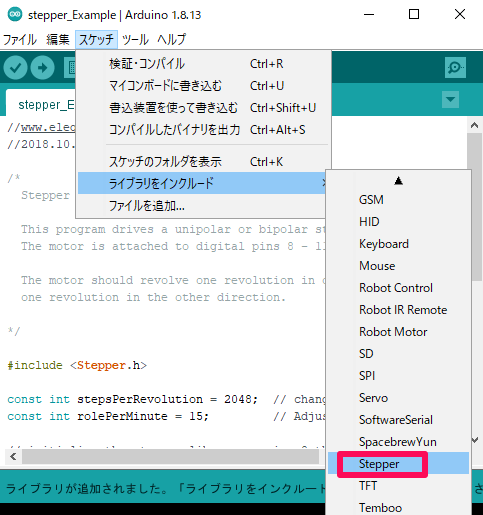
クリックすると、「スケッチ」の「ライブラリをインクルード」に「Stepper」が追加されます。

ライブラリが追加された状態で、「Arduino」の上部にある「マイコンボードに書き込む・書込装置を使って書き込み」ボタンをクリックします。クリックする際は、接続したPC(パソコン)でMEGA2560 R3ボードが認識されているかを確認し、クリックします。
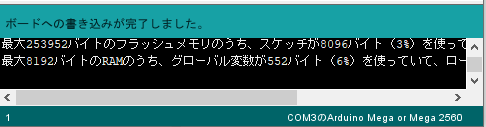
クリックすると、「ボードへの書き込みが完了しました。」と表示され、書き込みが成功しました。
書き込みが成功すると、ステッピングモーターがプログラムで制御され回転します。
■ステッピングモーターを操作できたのかの検証
書き込み後、ステッピングモーターを操作できたのかの検証を行いました。
検証を行いましたが、書き込んだプログラムでステッピングモーターが制御され回転することを確認できました。
コメント