Elegoo MEGA2560 R3ボードでミニサーボモーターを制御し動かしてみます。
■用意したもの
・Arduinoバージョン1.8.13がインストールされているPC(Windows10)
・Elegoo MEGA2560 R3ボード、1個

・SG90(Arduinoミニサーボモーター)、1つ
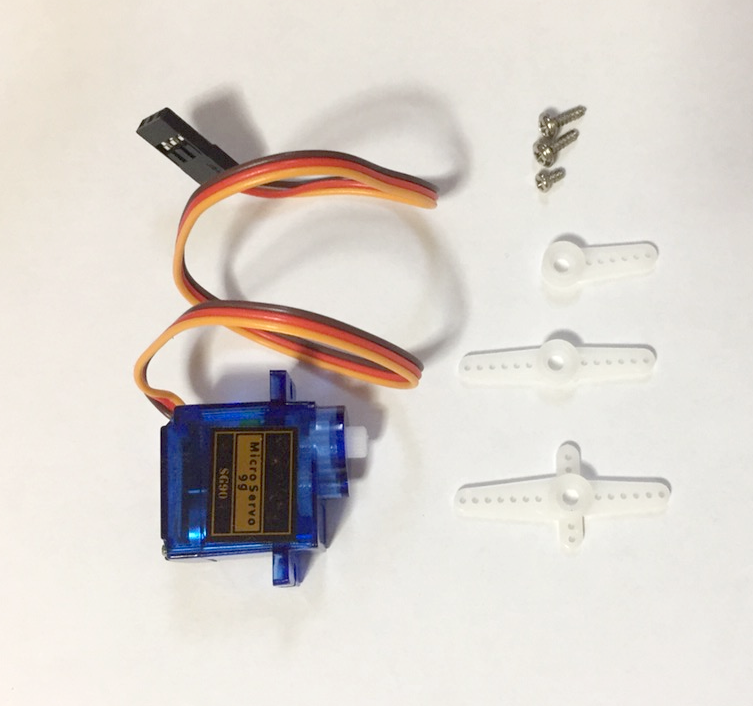
本体には「Micro Servo 9g SG90」と記載されています。
・オス – オス ジャンパー線(ジャンパーワイヤ)(M-M wires (Male to Male jumper wires))、3つ
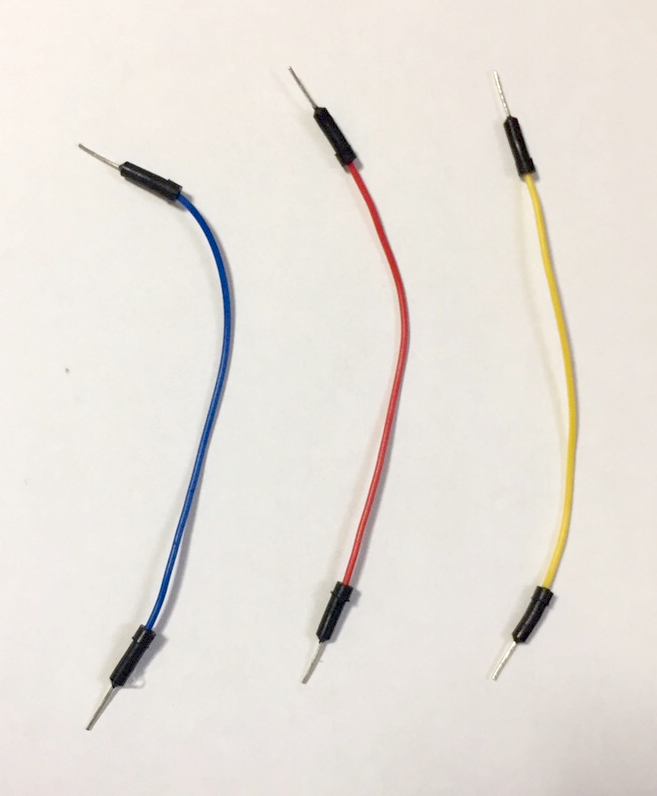
それぞれ(ELEGOO Arduino用のMega2560スタータキット最終版)に付属しているものです。
■サーボモーターへの理解
サーボモーターは、小型DCモータ、ポテンショメータ(抵抗値を任意の値に変更できる可変抵抗のもの)、制御回路の3つの部品で構成されている。モーターはギアでコントロールホイールに連結されている。モータが回転するとポテンショメータの抵抗値が変化するため、制御回路はどの方向にどれだけの動きがあるかを正確に制御することができます。
可変幅の電気パルス、パルス幅変調 (PWM) を送ることにより制御できる。サーボモーターは、通常、180°の移動全体で各方向に90°しか回転することができません。モータに送られるパルス幅変調 (PWM) は、シャフトの位置を定義し、制御ワイヤによって与えられるパルスの持続時間に基づいています。ローターが目的の位置に回転します。サーボモーターは20ミリ秒 (ms) ごとにパルスを必要します。このパルスの持続時間によってモーターが回転する距離が決まってきます。
■SG90(Arduinoミニサーボモーター)に部品を取り付け
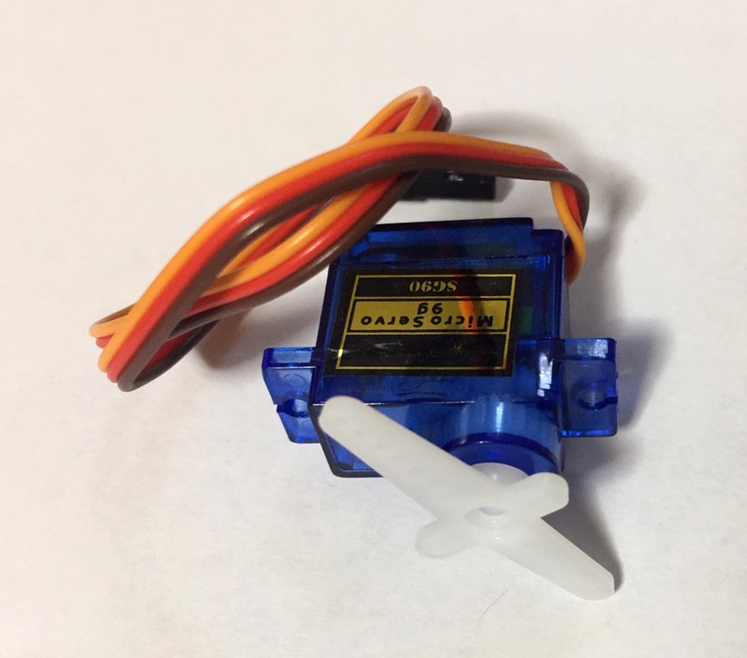
ミニサーボモーターを制御し動かしてみますので、SG90に付属していた部品をSG90本体にセットします。部品がギザギザになっている方を繋ぎます。
■オスからオスのジャンパー線と、ミニサーボモーターを繋ぐ
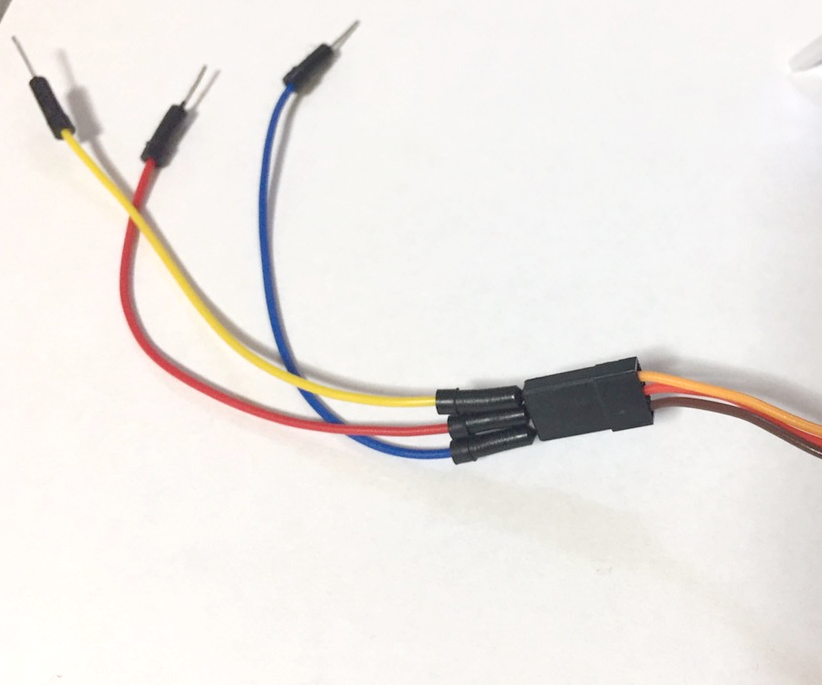
SG90に付属していた部品を取り付けた後は、SG90から出ている線に、オスからオスのジャンパー線を繋ぎます。SG90から出ている線には色が付いていますので、今回は黄色は「オレンジ色」、赤色は「赤色」、青色は「茶色」とします。
■Elegoo MEGA2560 R3ボードとオスからオスのジャンパー線を繋ぐ
SG90から出ている線に、オスからオスのジャンパー線を繋いだ後は、Elegoo MEGA2560 R3ボードとオスからオスのジャンパー線を繋ぎます。
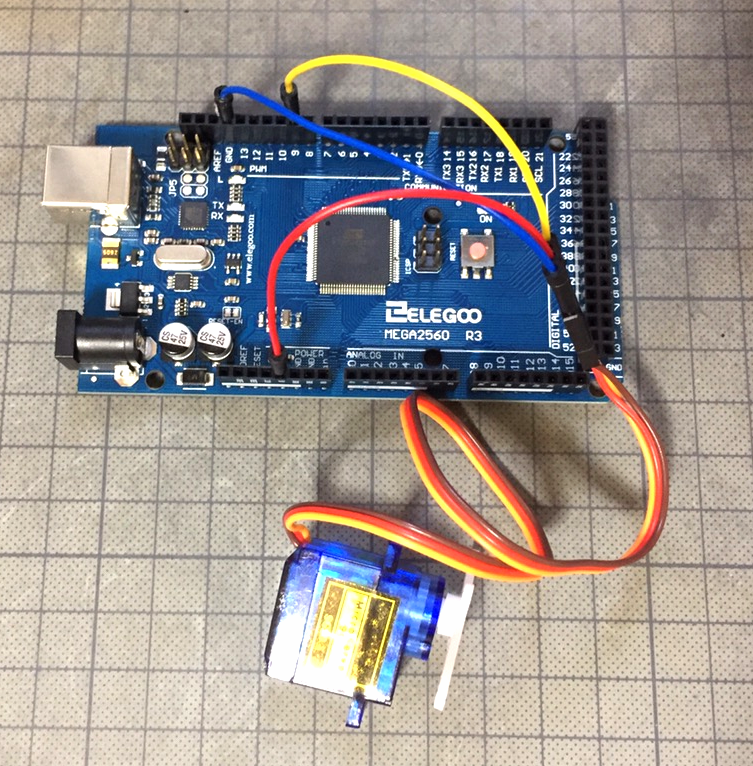
黄色は「9」、青色は「GND」、赤色は「5V」と記載されているところに繋ぎます。
■Elegoo MEGA2560 R3ボードをPC(パソコン)に接続する
接続後、Elegoo MEGA2560 R3ボードをUSBケーブルを使って、PC(パソコン)に接続する。
■コードをアップロードし、マイコンボードに書き込む
接続後、ELEGOO Arduino用のMega2560スタータキット最終版に付属したCD-ROMをパソコンで読み取ります。
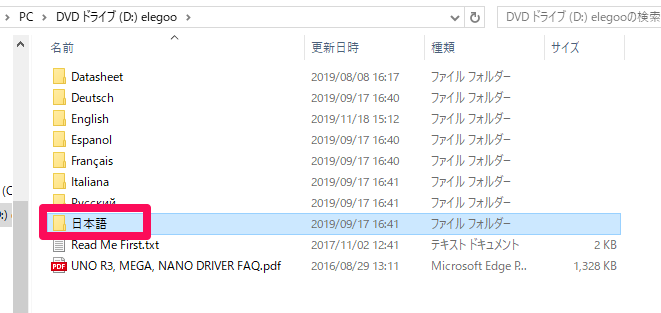
CD-ROMから「日本語」をクリックする。
「code」をクリックする。
「Lesson 9 Servo」をクリックする。
「servo」をクリックする。

「servo.ino」をクリックする。
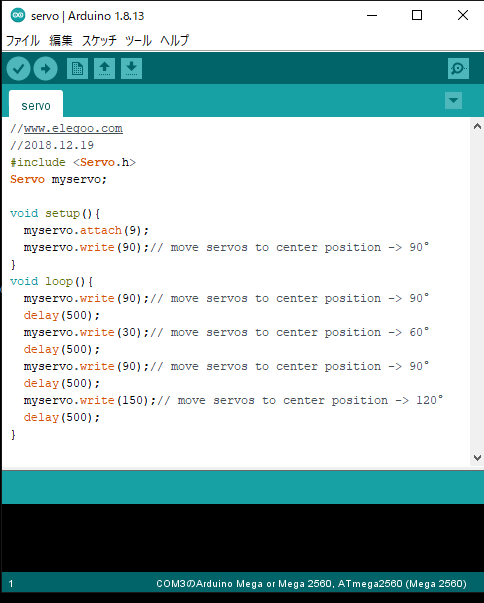
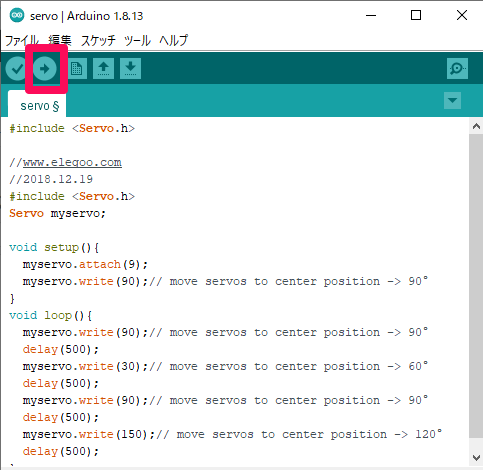
クリックすると、「Arduino」が起動し、ウインドウ内に「servo」のコードが表示されます。
このコードをMEGA2560 R3ボードに書き込みを行いますが、その前に「Servo」というライブラリがないと、書き込みが行えませんので、CD-ROMの「Lesson 9 Servo」の中にあった「Servo.zip」をコピーし、Windows10のローカル上に保存します。
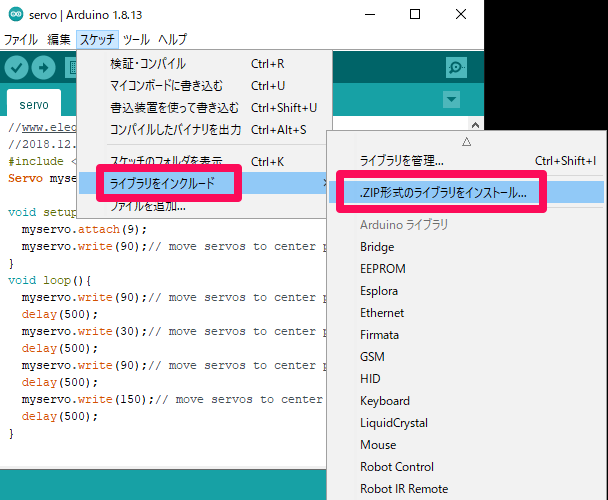
保存後、「Arduino」のウインドウ上部の「スケッチ」をクリックします。クリックした後に、「ライブラリをインクルード」をクリックし、「.ZIP形式のライブラリをインストール」をクリックします。
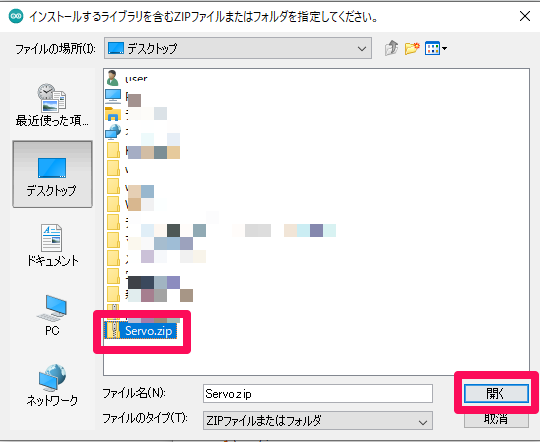
クリックすると「インストールするライブラリを含むZIPファイルまたはフォルダを指定してください。」というウインドウが表示されますので、「Servo.zip」を選択し、「開く」ボタンをクリックします。

クリックすると、「スケッチ」の「ライブラリをインクルード」のライブラリに「Servo」が追加されますので、こちらをクリックします。クリックすると、「Servo」ライブラリが追加された状態になります。
ライブラリが追加された後は、「Arduino」の上部にある「マイコンボードに書き込む・書込装置を使って書き込み」ボタンをクリックします。クリックする際は、接続したPC(パソコン)でMEGA2560 R3ボードが認識されているかを確認し、クリックします。
クリックすると、「ボードへの書き込みが完了しました。」と表示され、書き込みが成功しました。
■ミニサーボモーターを制御し動いたのか検証
書き込みが成功した後、コードに記述された角度にミニサーボモーターが動いていることが確認できました。
コメント