Arduino Elegoo MEGA2560 R3ボードで超音波センサーモジュールを使用してサーボモーターを制御してみます。
- ■用意したもの
- ■超音波センサモジュールとメスからオスのデュポンワイヤーを接続する
- ■超音波センサモジュールに接続したデュポンワイヤーをブレッドボードに接続する
- ■超音波センサモジュールに接続したデュポンワイヤーをMEGA2560 R3ボードに接続する
- ■ブレッドボードにサーボモーターを接続する
- ■サーボモーターに接続したジャンパー線をMEGA2560 R3ボードに接続する
- ■MEGA2560 R3ボードとブレッドボードを接続する
- ■Elegoo MEGA2560 R3ボードをPC(パソコン)に接続する
- ■Elegoo MEGA2560 R3ボードをPC(パソコン)に接続する
- ■新しいファイルにコードを書き、マイコンボードに書き込む
- ■シリアルモニタで超音波センサーで対象物の距離を測定
- ■超音波センサーモジュールを使用してサーボモーターを制御できたのか検証
■用意したもの
・Arduinoバージョン1.8.13がインストールされているPC(Windows10)
・Elegoo MEGA2560 R3ボード、1個(https://amzn.to/33ytufU)

・BREADBOARD(ブレットボード) MB-102、1個(https://amzn.to/33l1nky)
・超音波センサモジュール(Ultrasonic sensormodule) HC-SR04、1個(https://amzn.to/3mt8Nd0)
本体に「HC-SR04」と記載されています。
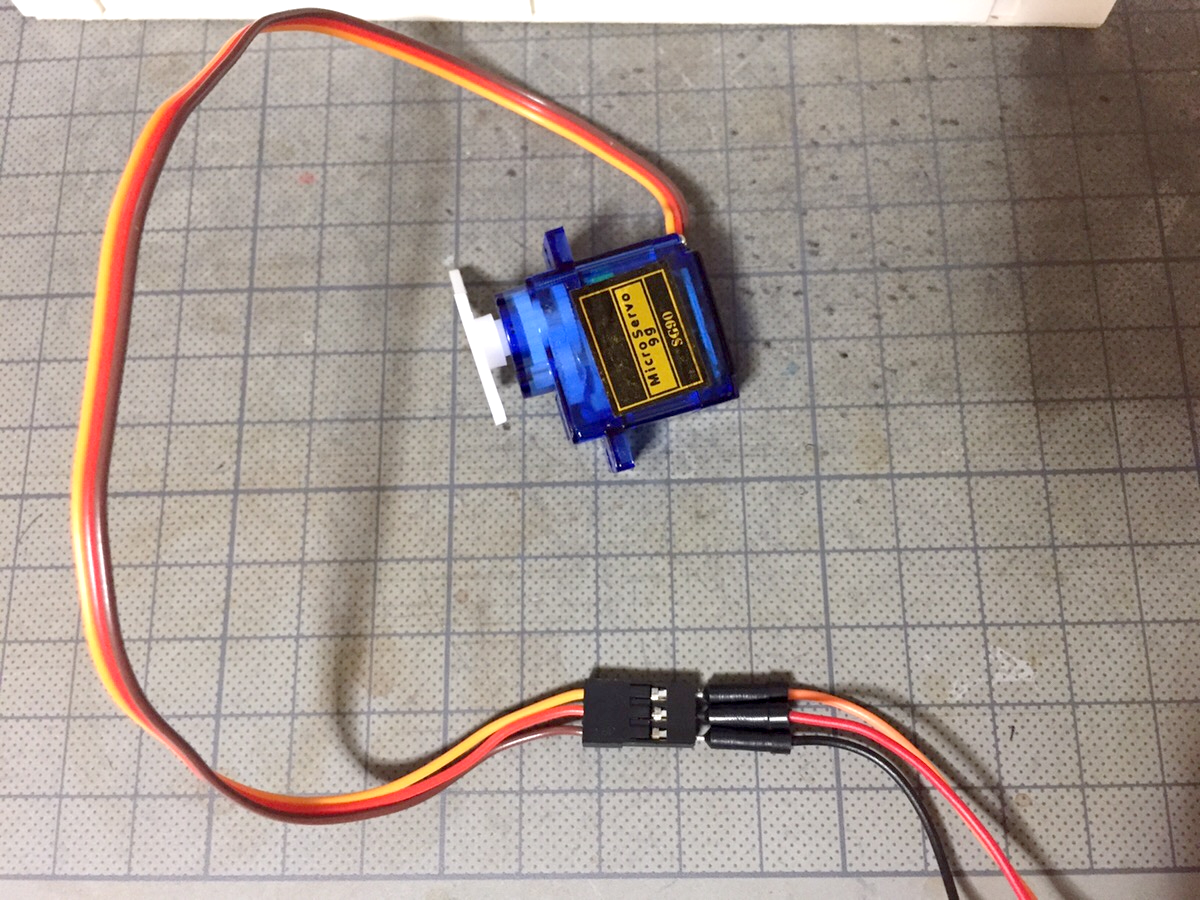
・SG90(Arduinoミニサーボモーター)、1つ(https://amzn.to/2OrX423)

本体には「Micro Servo 9g SG90」と記載されています。
・オス – オス ジャンパー線(ジャンパーワイヤ)(M-M wires (Male to Male jumper wires))、4つ(https://amzn.to/2MPDLPK)
・メスからオスのデュポンワイヤーリボンケーブル、4個(Female to Male DuPont wires)(https://amzn.to/2TtT7Jk)
それぞれ(ELEGOO Arduino用のMega2560スタータキット最終版)に付属しているものです。
■超音波センサモジュールとメスからオスのデュポンワイヤーを接続する
それでは、Elegoo MEGA2560 R3ボードで超音波センサーモジュールを使用してサーボモーターを制御してみますので、まずは、超音波センサモジュールとメスからオスのデュポンワイヤーを接続します。
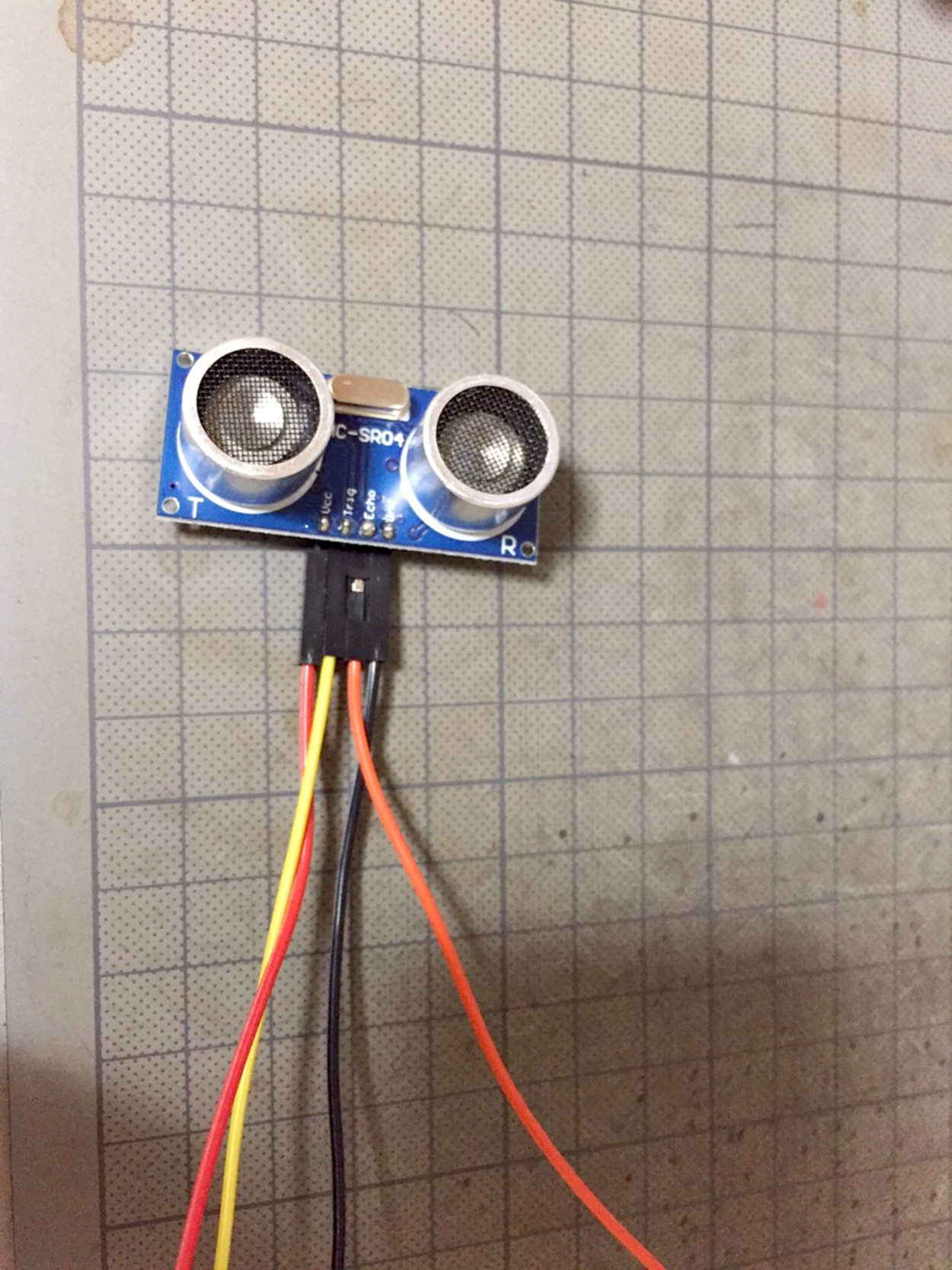
※デュポンワイヤーのオス、メスに注意する。
接続する際は、デュポンワイヤーの「メス」の方を、超音波センサモジュールのピンに差し込みます。
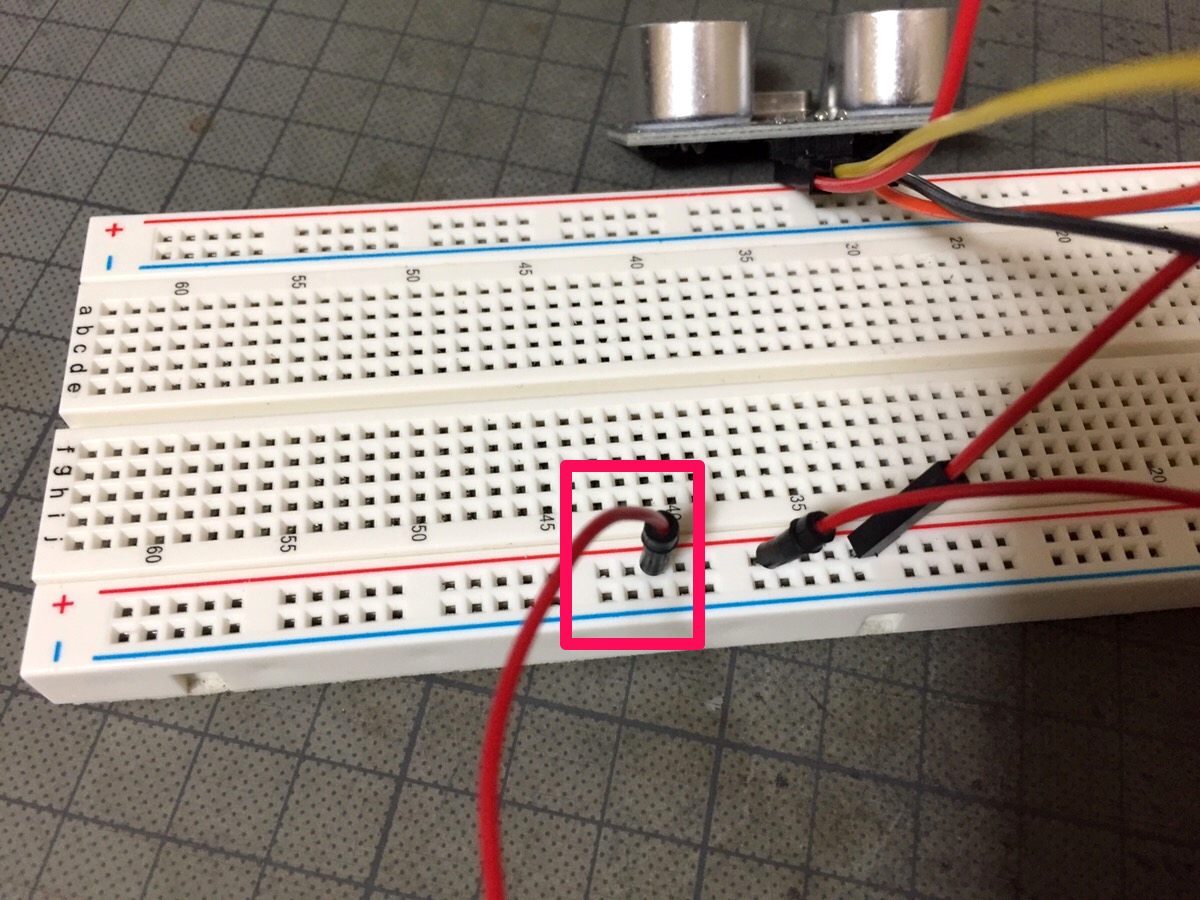
■超音波センサモジュールに接続したデュポンワイヤーをブレッドボードに接続する
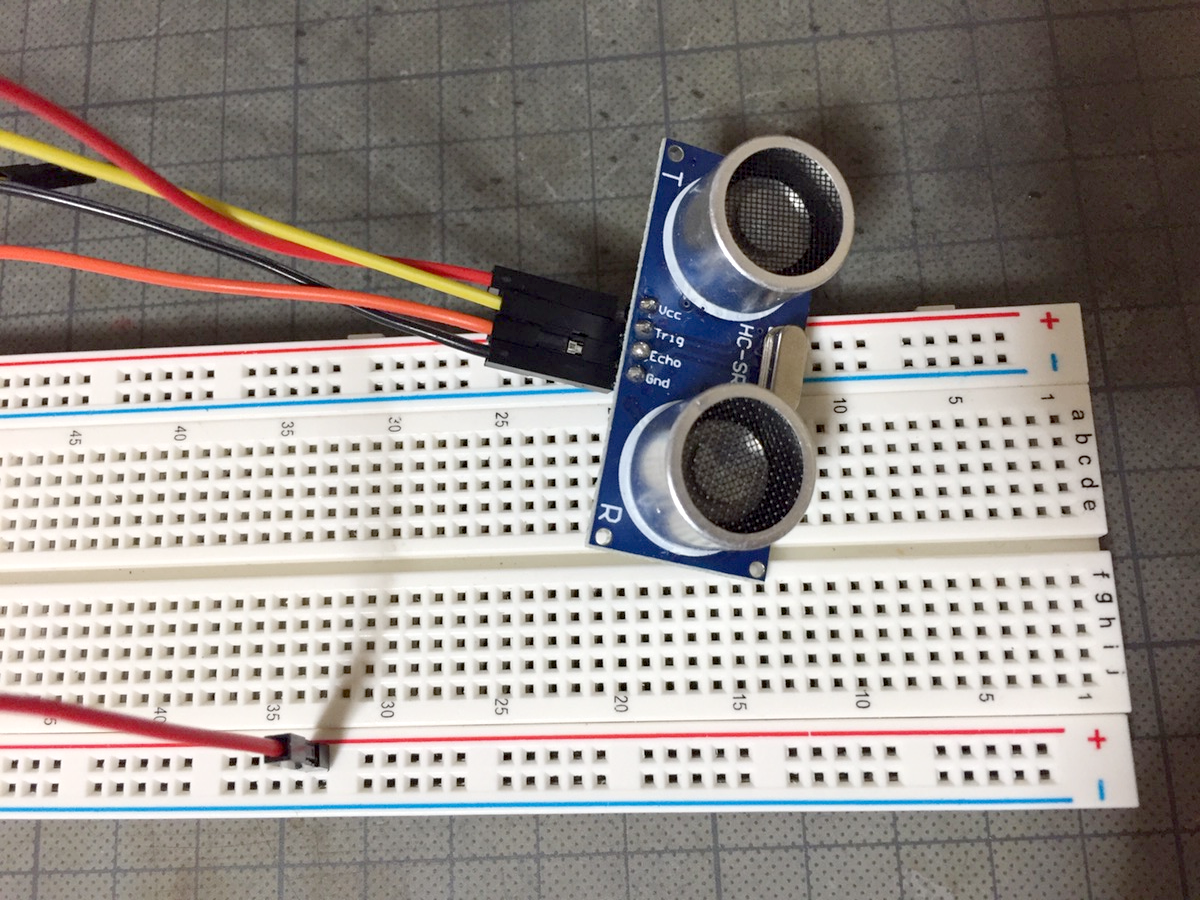
接続後、超音波センサモジュールに接続したデュポンワイヤーの赤色(VCC)を、ブレッドボードの「+(プラス)」と記載されているところに接続します。
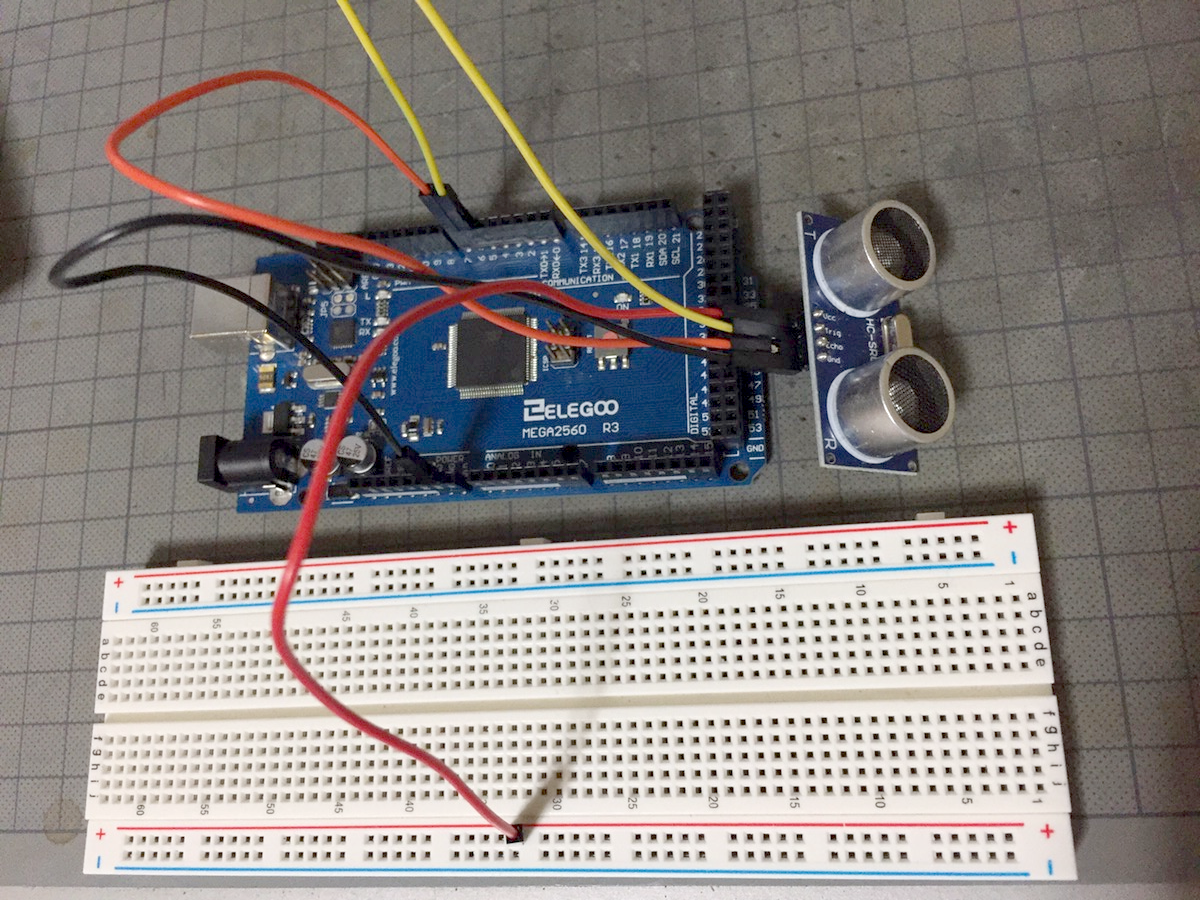
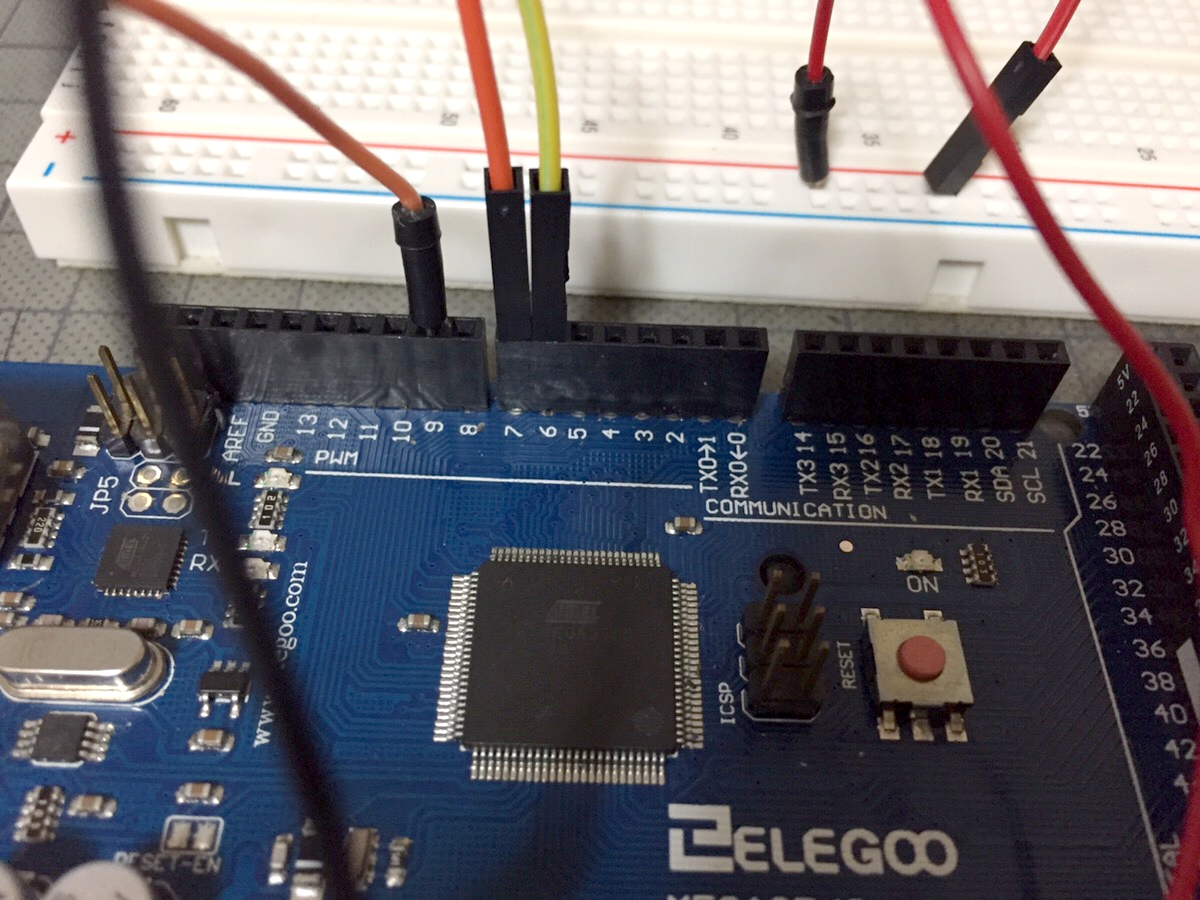
■超音波センサモジュールに接続したデュポンワイヤーをMEGA2560 R3ボードに接続する

![]()
接続後、超音波センサモジュールに接続したデュポンワイヤーを、MEGA2560 R3ボードに接続します。配線は上記の通りです。
■ブレッドボードにサーボモーターを接続する
接続後、ブレッドボードにサーボモーターを接続します。
接続する前に、サーボモーターにオスからオスのジャンパー線を接続します。
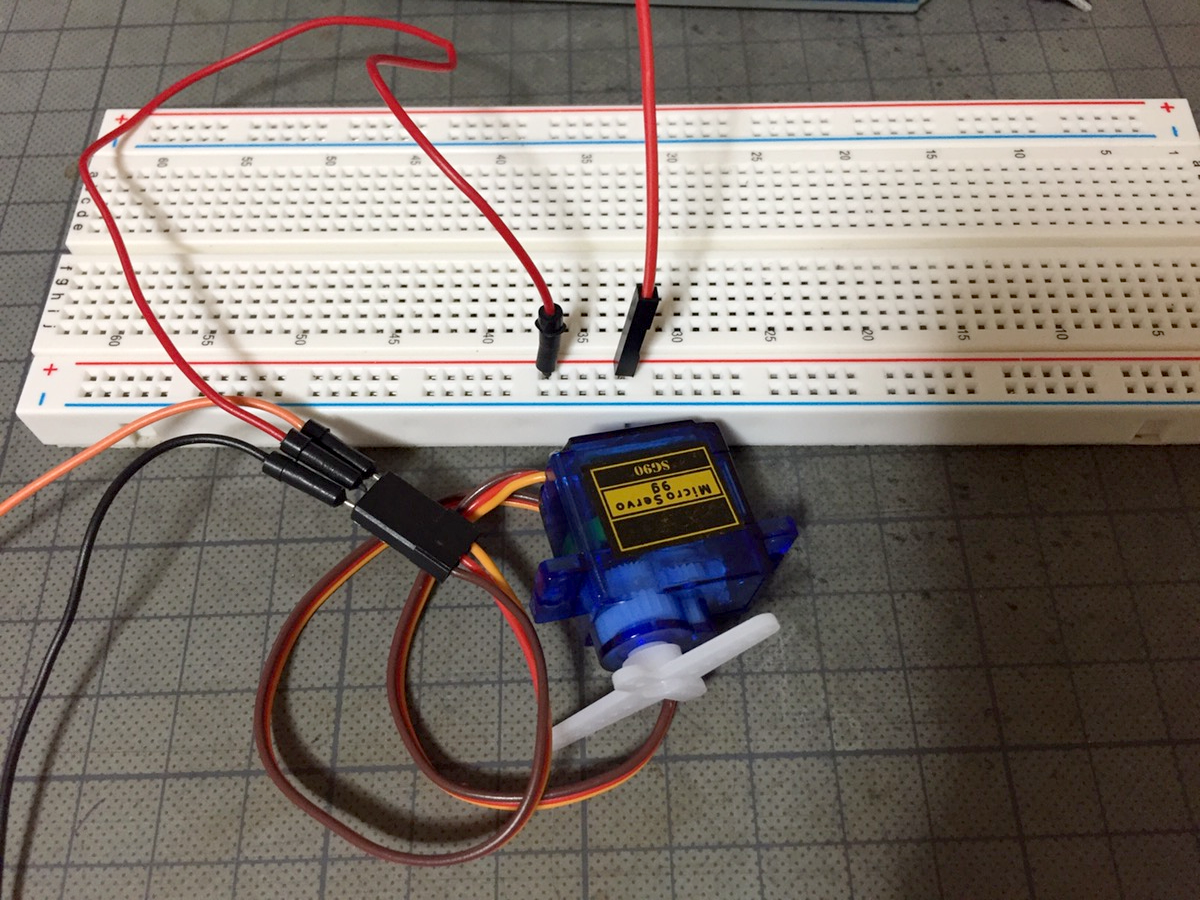
接続後に、サーボモーターに接続したジャンパー線の赤色を、ブレッドボードの「+(赤色)」に接続します。
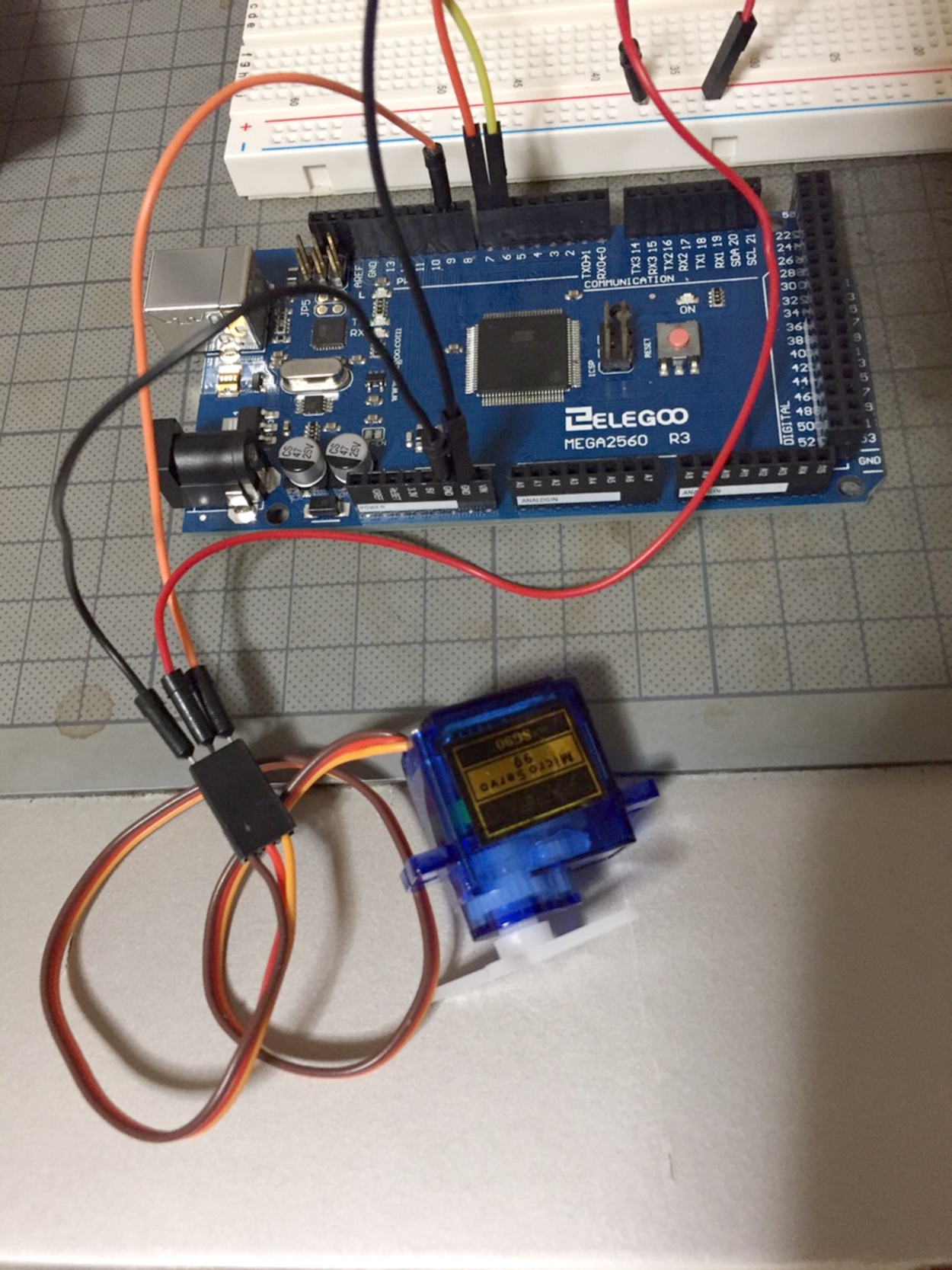
■サーボモーターに接続したジャンパー線をMEGA2560 R3ボードに接続する
接続後、サーボモーターに接続したジャンパー線をMEGA2560 R3ボードに接続します。

![]()
配線は、上記の通りです。
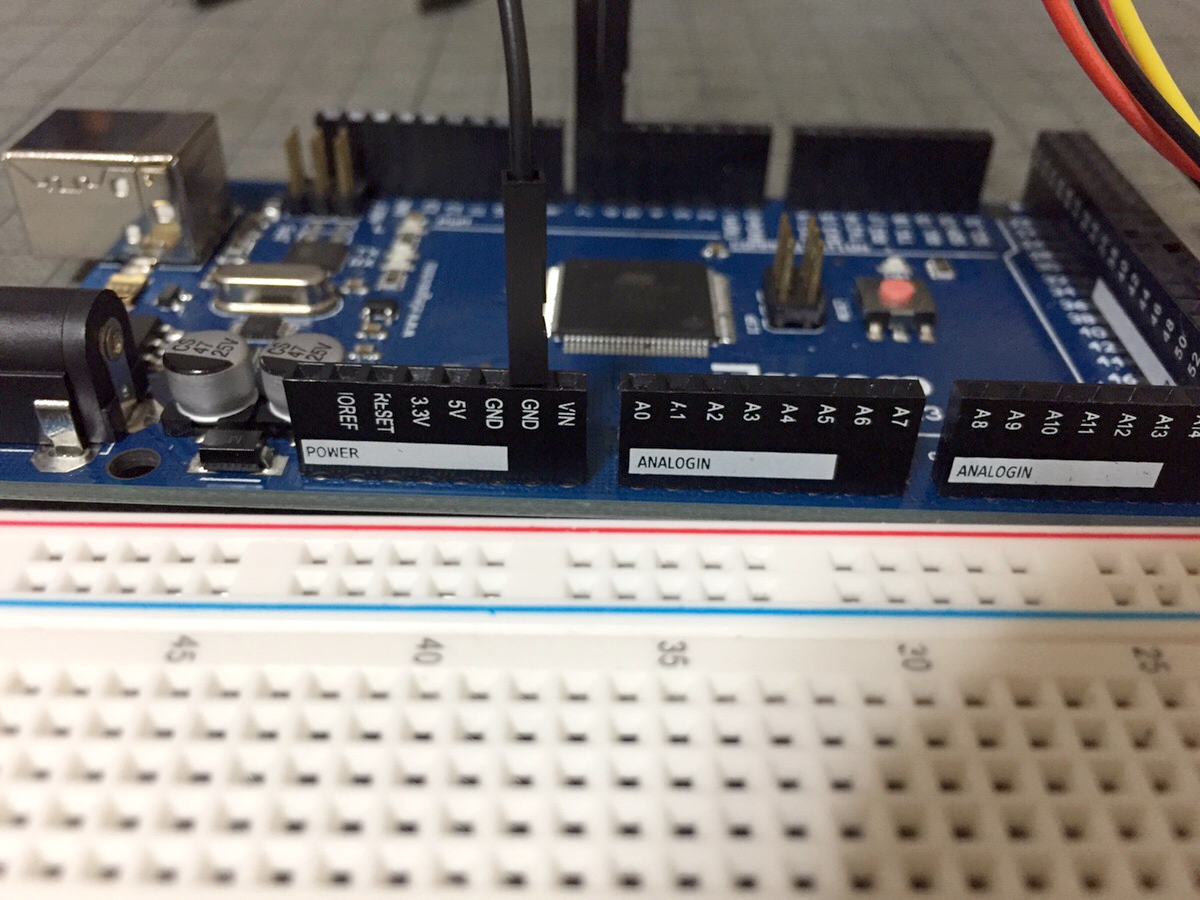
■MEGA2560 R3ボードとブレッドボードを接続する
接続後、MEGA2560 R3ボードとブレッドボードを接続します。
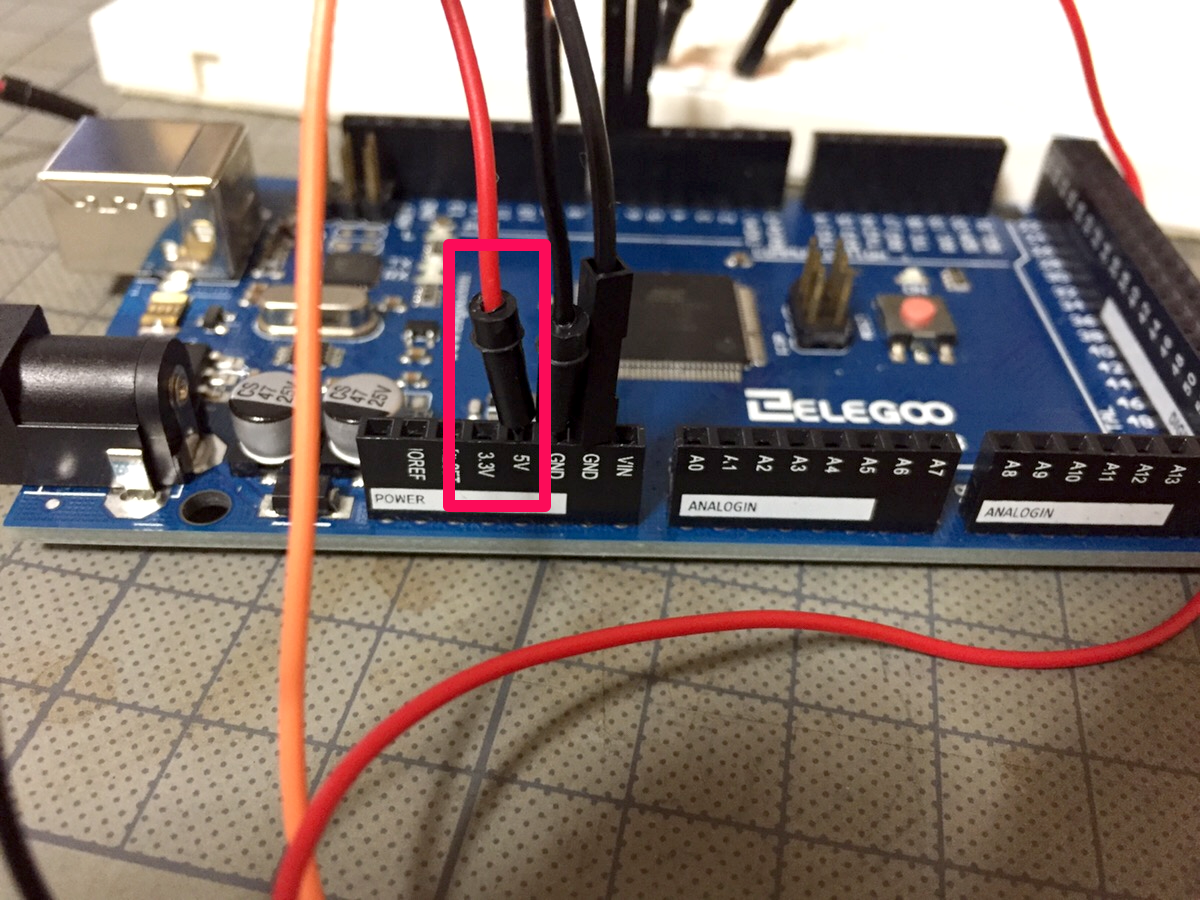
MEGA2560 R3ボードの「5V」にオスからオスのジャンパー線(赤色)を接続し、ブレッドボードの「+」に接続します。
■Elegoo MEGA2560 R3ボードをPC(パソコン)に接続する
接続後、Elegoo MEGA2560 R3ボードをUSBケーブルを使って、PC(パソコン)に接続する。
■Elegoo MEGA2560 R3ボードをPC(パソコン)に接続する
接続後、Elegoo MEGA2560 R3ボードをUSBケーブルを使って、PC(パソコン)に接続する。
■新しいファイルにコードを書き、マイコンボードに書き込む
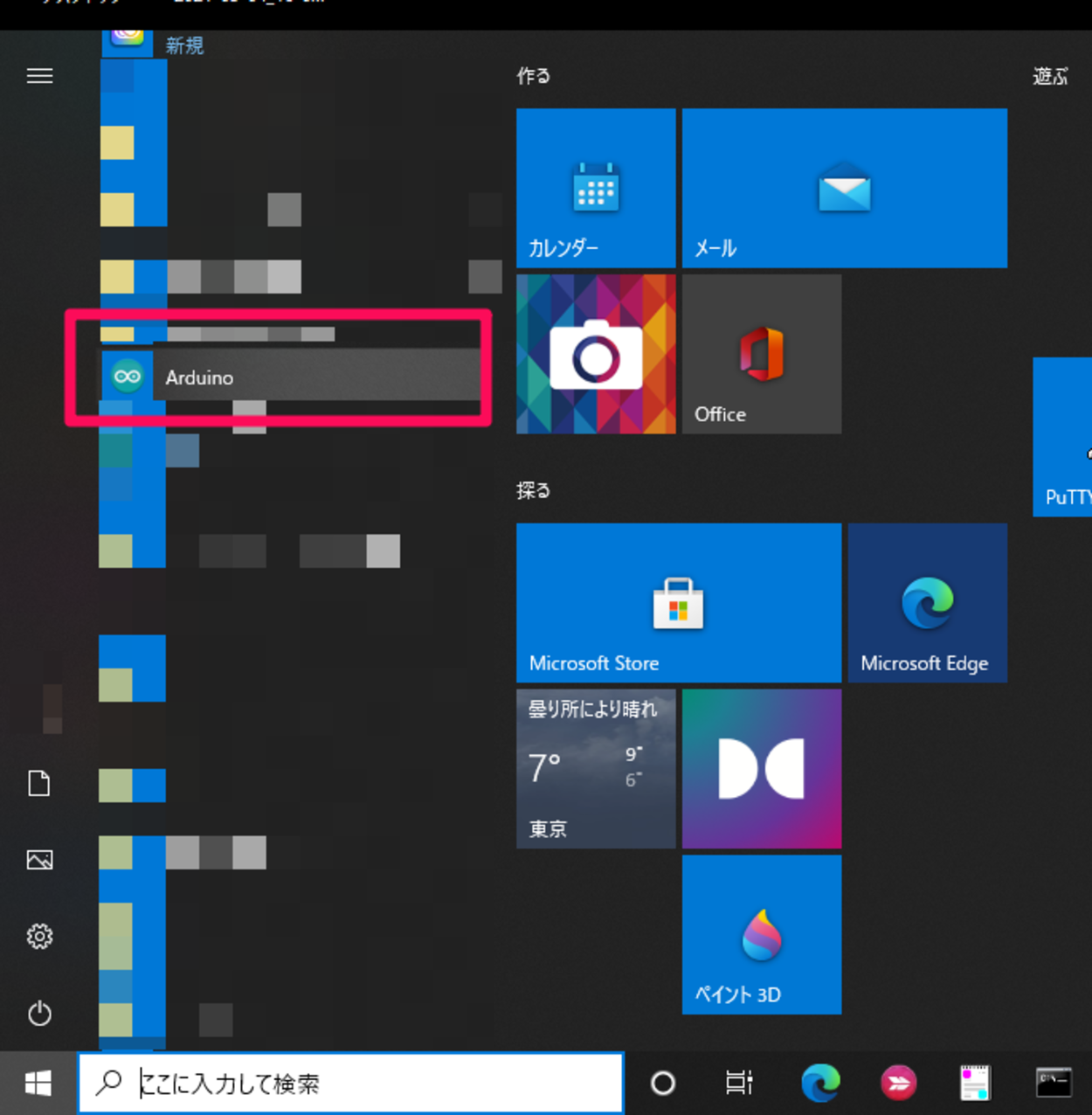
接続後、Windows10にインストールしてある「Arduino」が起動します。
起動すると、「Arduino」のウインドウ内の「ファイル」から「新規ファイル」をクリックします。
クリックすると、新規のファイル(スケッチ)が作成されますので、ファイル(スケッチ)内に超音波センサーモジュールを使用してサーボモーターを制御のコードを書いていきます。
■コード
今回は、こちら(https://arduinogetstarted.com/tutorials/arduino-ultrasonic-sensor-servo-motor)の掲載されているコードを使用させていただきます。対象物が超音波センサーに近づいたり、遠ざかるとサーボモーターが動きます。
このコードは、“Servo”というライブラリが必要となります。

書き込む前に、「Arduino」ウインドウ内の「ツール」をクリックし、「ボード」、「プロセッサ」、「シリアルポート」が、「MEGA2560」と表示されてWindows10に認識されているかを確認します。
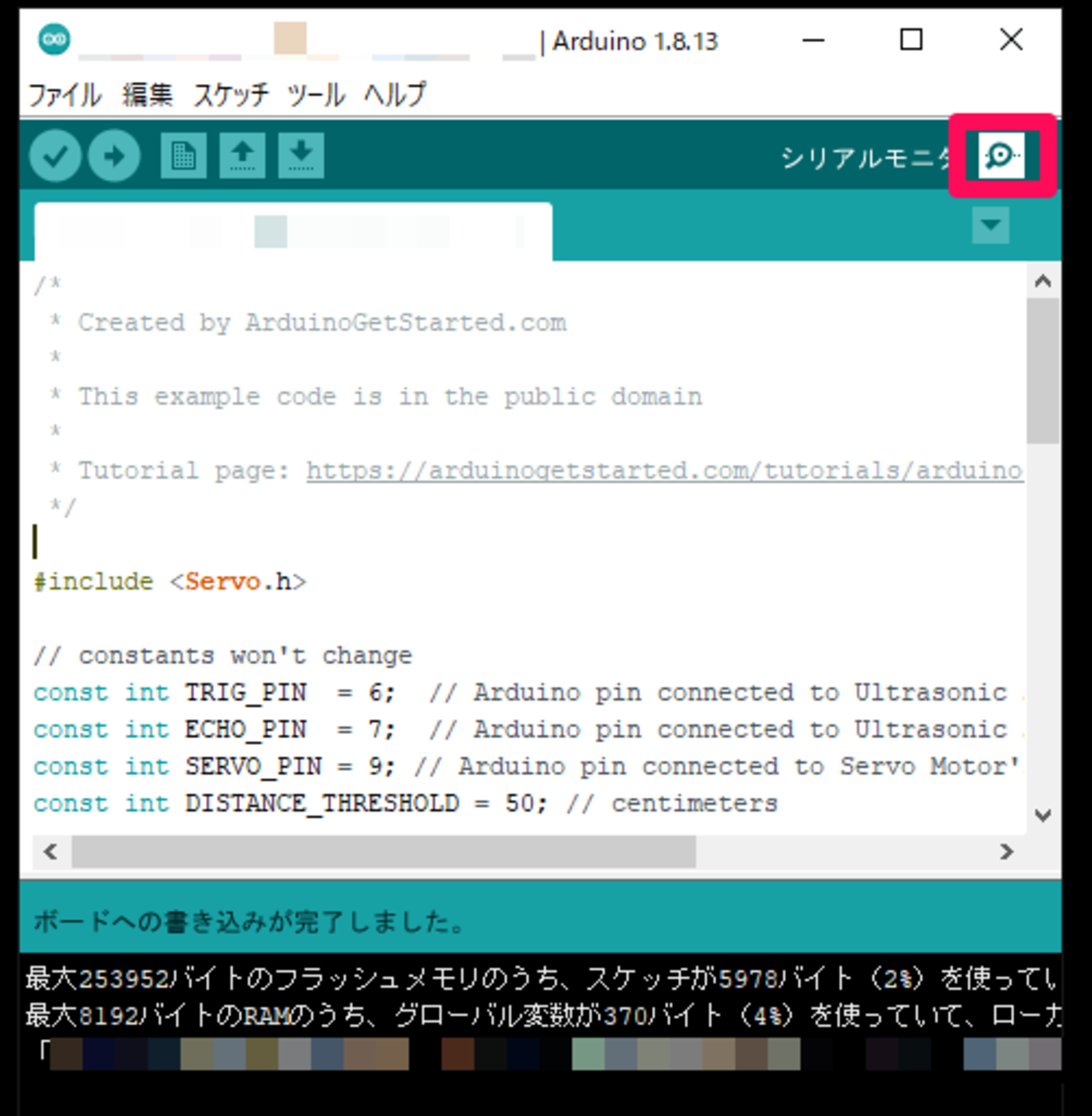
確認後、「Arduino」ウインドウ内の上部にある「マイコンボードに書き込む・書込装置を使って書き込み」ボタンをクリックします。

クリックすると、Elegoo MEGA2560 R3ボードにファイル(スケッチ)が書き込まれ、「Arduino」ウインドウ内の下に「ボードへの書き込みが完了しました。」と表示されます。これで書き込みは完了となります。
■シリアルモニタで超音波センサーで対象物の距離を測定
書き込み後、「Arduino」ウインドウ内の上にある「シリアルモニタ」をクリックします。
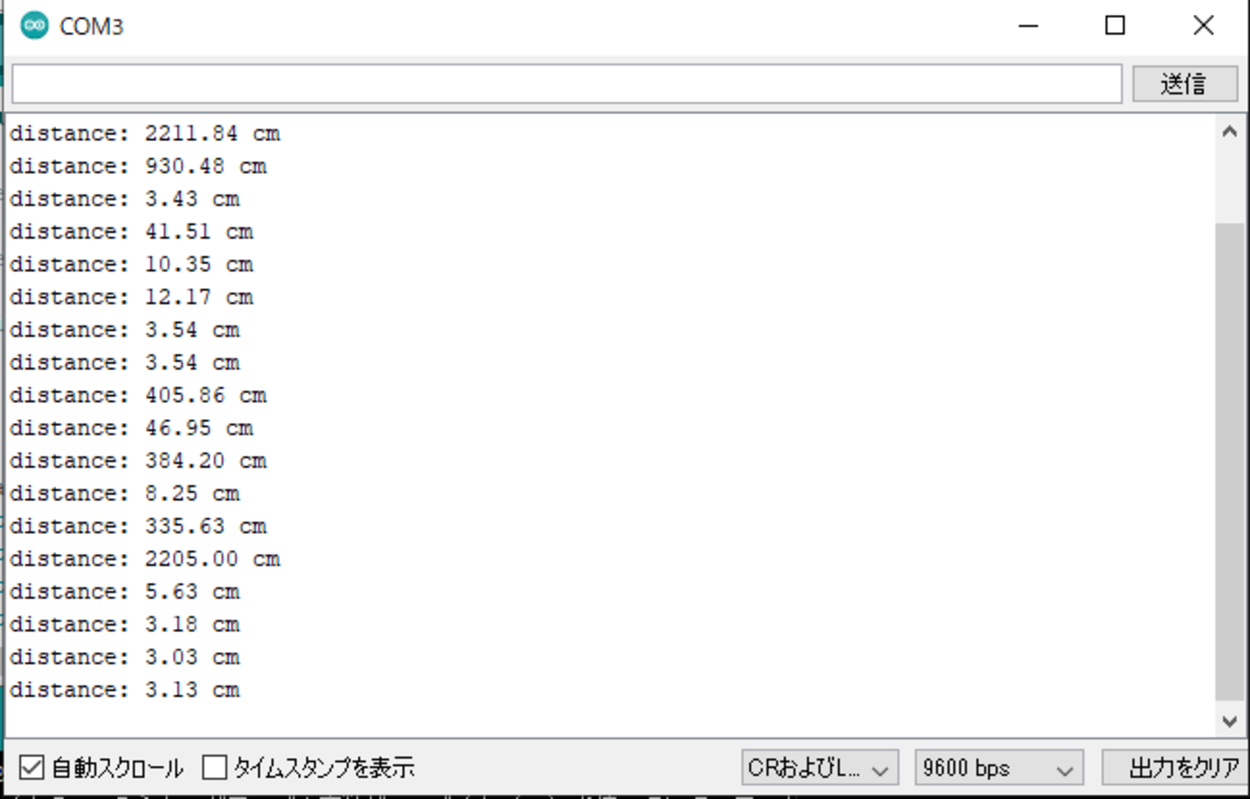
クリックすると、「COM3」というウインドウが表示され、超音波センサーで検知した対象物までの距離が出力されます。
■超音波センサーモジュールを使用してサーボモーターを制御できたのか検証
超音波センサーで検知した対象物までの距離を確認後、超音波センサーモジュールでサーボモーターを制御できたのかの検証を行いました。
検証を行いましたが、超音波センサーモジュールに手を近づけると、サーボモーターが動くことを確認できました。
コメント