Arduino Elegoo MEGA2560 R3ボードでアナログジョイスティックモジュールによるステッピングモーターの制御を行ってみます。
- ■用意したもの
- ■ブレッドボードにブレッドボード用電源モジュールを接続する
- ■ブレッドボードと、ULN2003 ステッパーモータードライバーモジュールを接続する
- ■ULN2003 ステッピングモータードライバーモジュールと、ステッパーモーターを接続する
- ■ULN2003 ステッピングモータードライバーモジュールと、MEGA2560 R3ボードを接続する
- ■ブレッドボードと、MEGA2560 R3ボードを接続する
- ■アナログジョイスティックと、MEGA2560 R3ボードを接続する
- ■Elegoo MEGA2560 R3ボードをPC(パソコン)に接続する
- ■新しいファイルにコードを書き、マイコンボードに書き込む
- ■アナログジョイスティックモジュールによるステッピングモーターの制御ができるのか検証
■用意したもの
・Arduinoバージョン1.8.13がインストールされているPC(Windows10)
・Elegoo MEGA2560 R3ボード、1個(https://amzn.to/33ytufU)

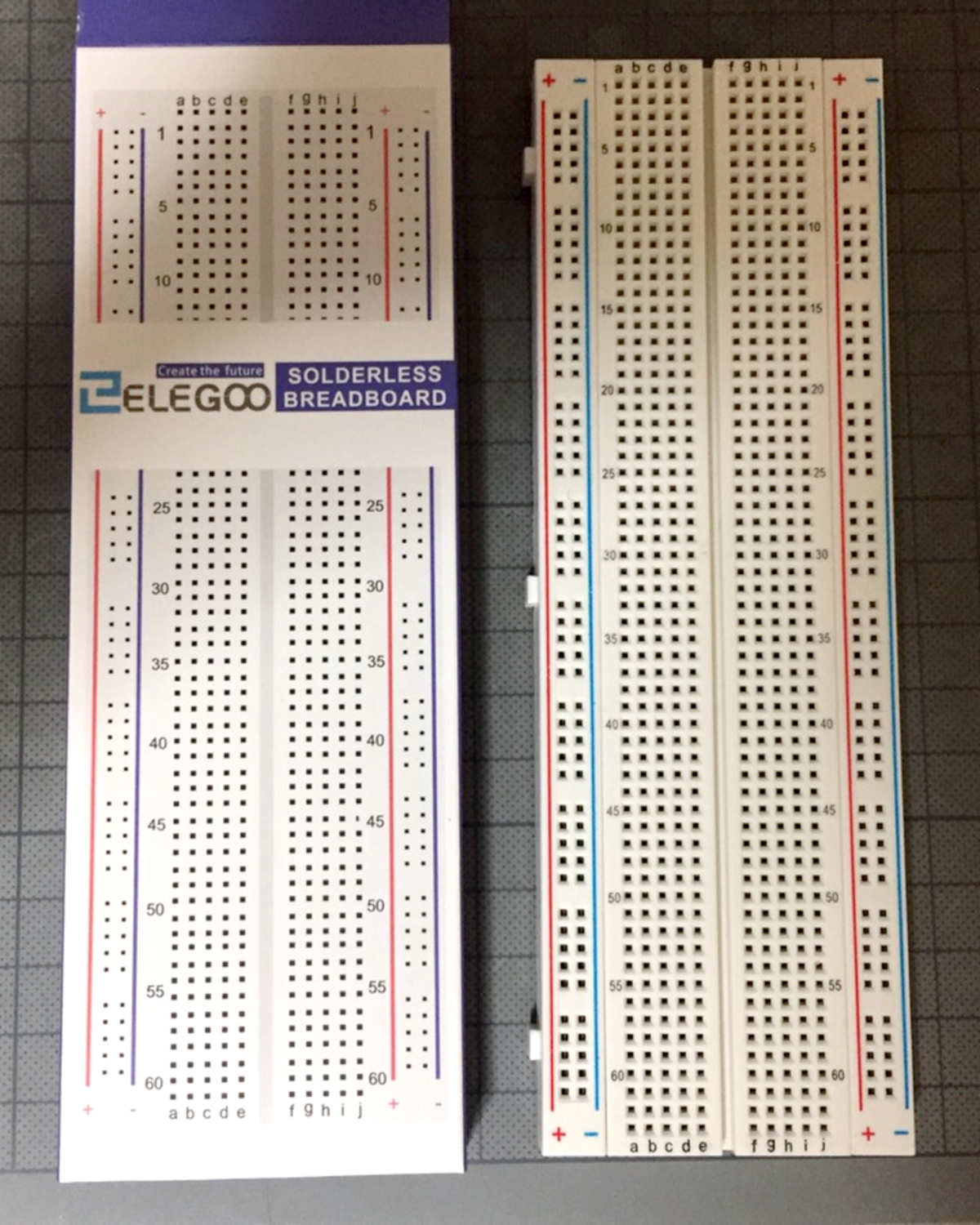
・BREADBOARD(ブレットボード) MB-102、1個(https://amzn.to/33l1nky)
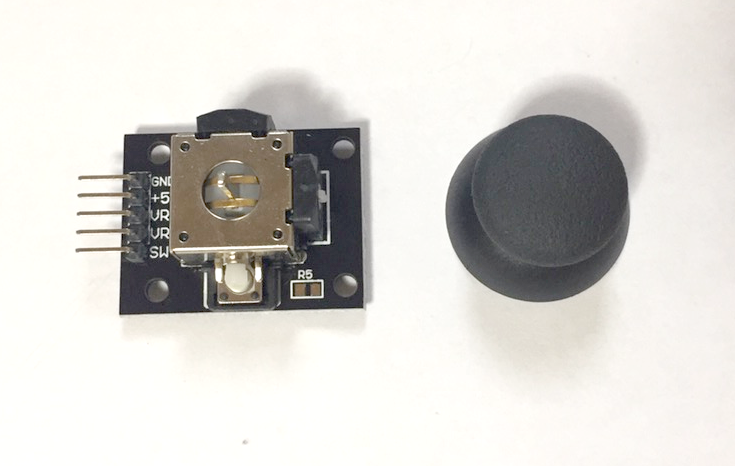
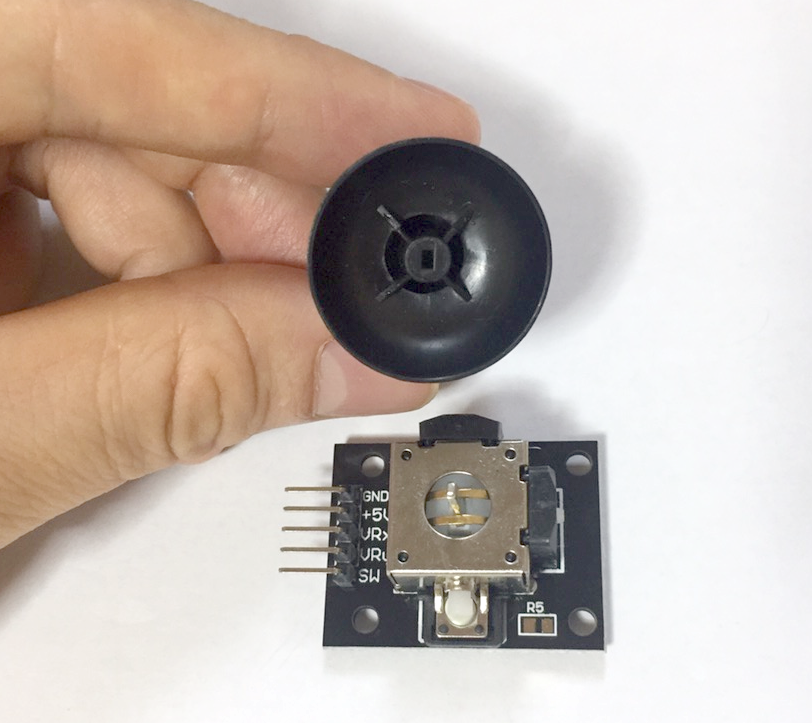
・アナログジョイスティックモジュール(Joystick module)、1個(https://amzn.to/35AQ33U)

・ステッピングモーター(ステッパーモーター)(Stepper motor)、1個(https://amzn.to/3l8wGVK)

・ULN2003 ステッピングモーター(ステッパーモーター)ドライバーモジュール(stepper motor drivermodule)、1個(https://amzn.to/3l8wGVK)

・オス – オス ジャンパー線(ジャンパーワイヤ)(M-M wires (Male to Male jumper wires))、4つ(https://amzn.to/2MPDLPK)
・メスからオスのデュポンワイヤーリボンケーブル、11つ(Female to Male DuPont wires)(https://amzn.to/2TtT7Jk)
それぞれ(ELEGOO Arduino用のMega2560スタータキット最終版)に付属しているものです。
■ブレッドボードにブレッドボード用電源モジュールを接続する
それでは、 アナログジョイスティックモジュールによるステッピングモーターの制御をしてみますので、まずブレッドボードに、 アナログジョイスティックモジュールを接続します。
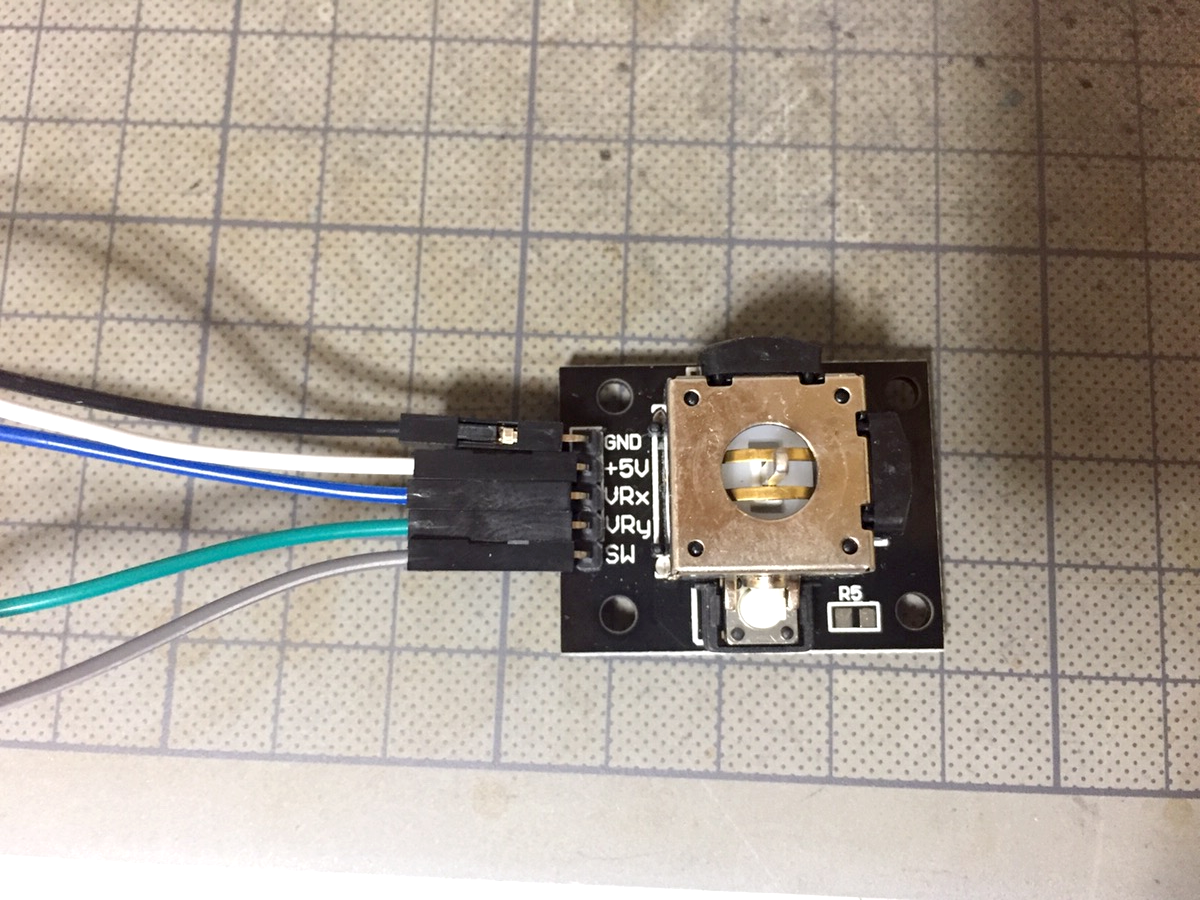
接続する前に、アナログジョイスティックモジュールにメスからオスのデュポンワイヤーリボンケーブルを接続しておきます。

接続後、ブレッドボードにメスからオスのデュポンワイヤーリボンケーブルを接続します。この時、アナログジョイスティックモジュールの「VRx」と表記されたピンに接続したデュポンワイヤーリボンケーブルはブレッドボードに接続しません。
■ブレッドボードと、ULN2003 ステッパーモータードライバーモジュールを接続する
接続後、ブレッドボードと、ULN2003 ステッピングモータードライバーモジュールを接続します。
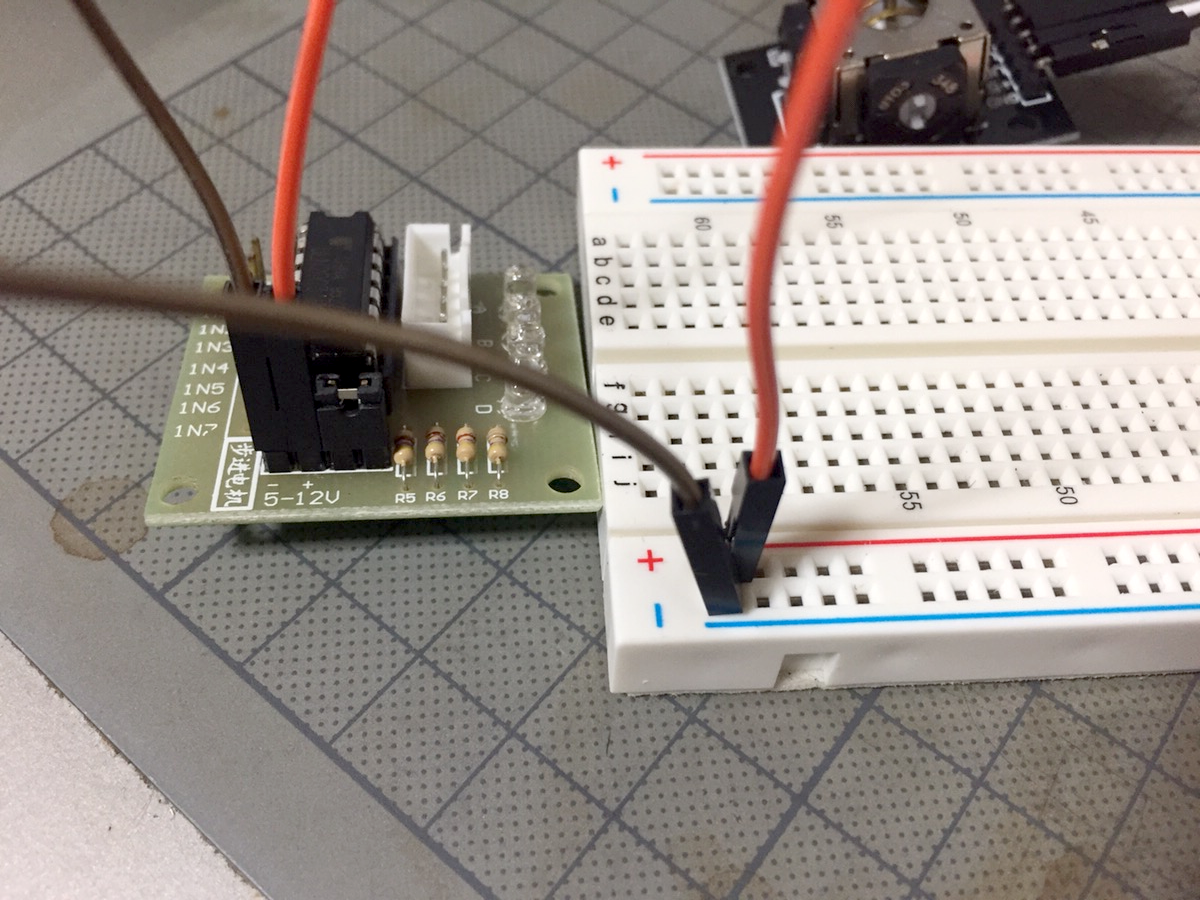
ブレッドボードに記載されている「+」と「-」、モジュールに記載されている「+」、「-」が合わさるように接続します。今回は、オレンジ色(+)、茶色(-)のメスからオスのデュポンワイヤーリボンケーブルを使用しています。
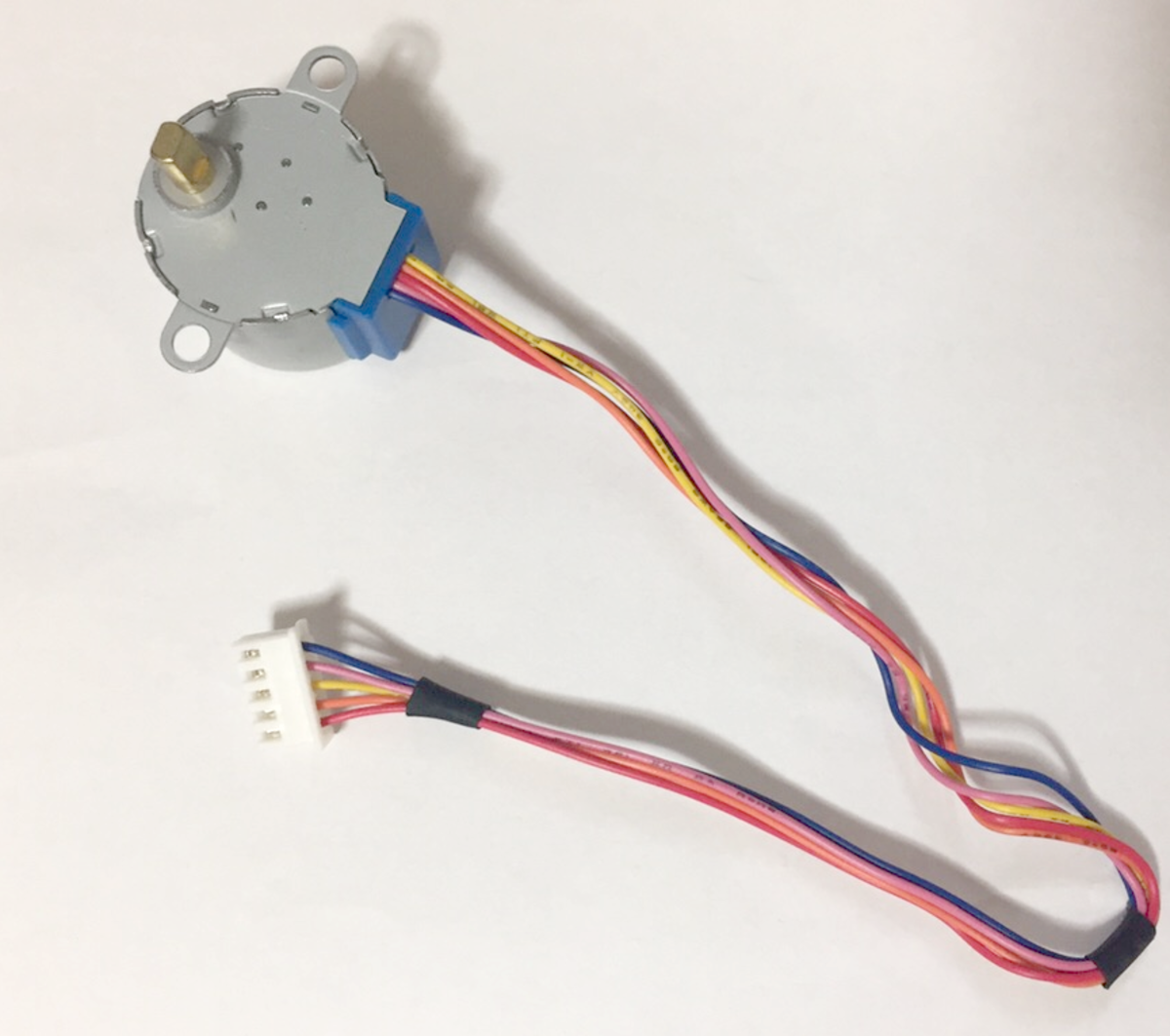
■ULN2003 ステッピングモータードライバーモジュールと、ステッパーモーターを接続する
接続後、ULN2003 ステッピングモータードライバーモジュールと、ステッピングモーター(ステッパーモーター)を接続します。

■ULN2003 ステッピングモータードライバーモジュールと、MEGA2560 R3ボードを接続する
接続後、ULN2003 ステッピングモータードライバーモジュールと、MEGA2560 R3ボードを接続します。
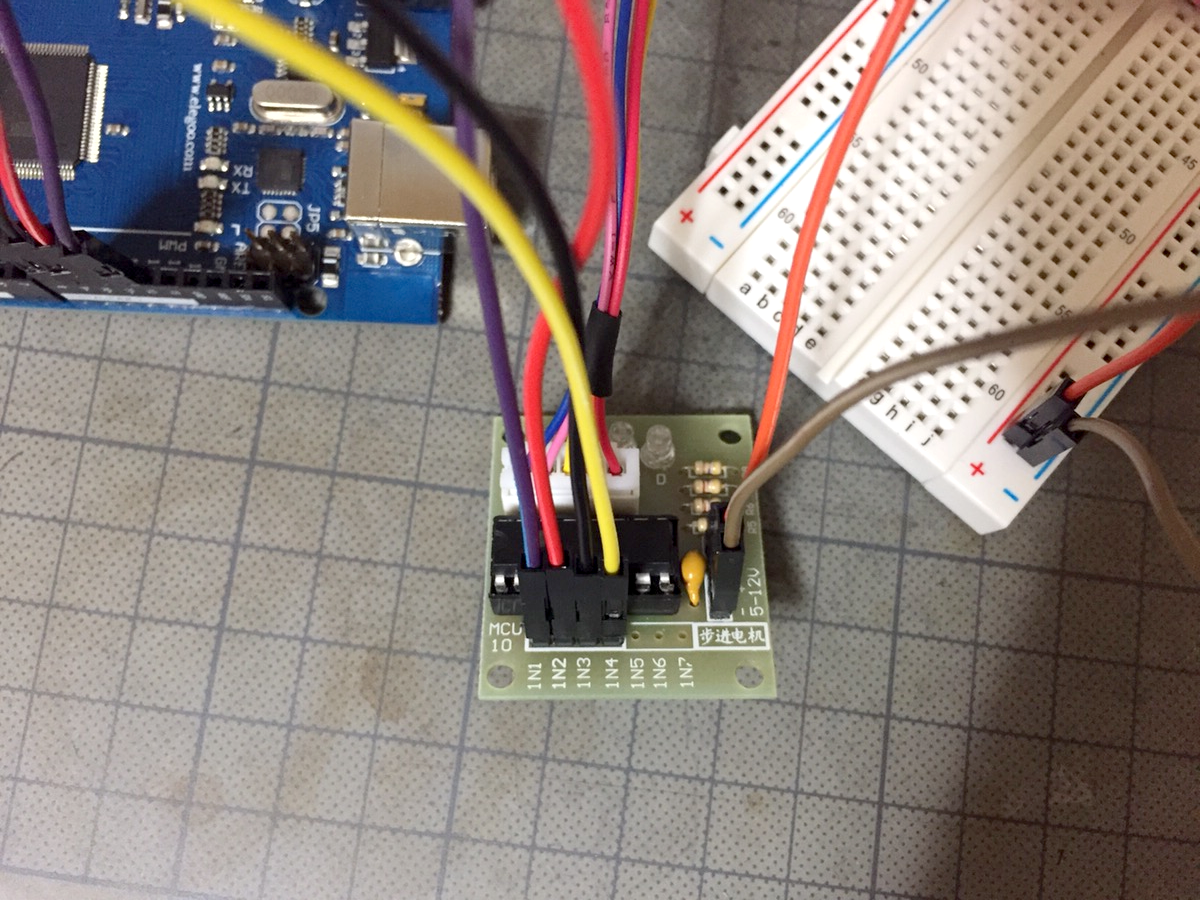

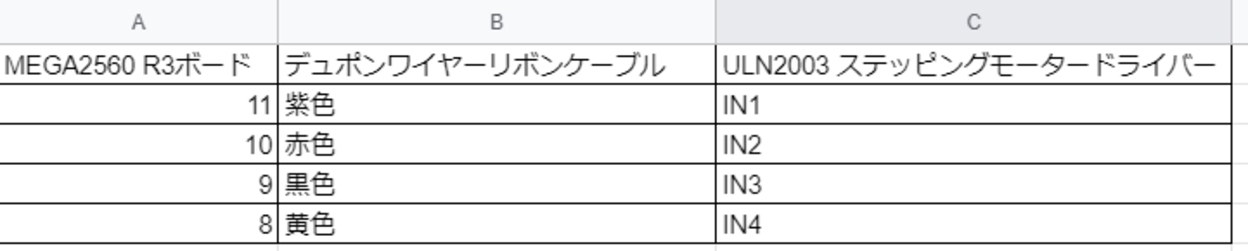
配線を間違えないようにします。
■ブレッドボードと、MEGA2560 R3ボードを接続する
接続後、ブレッドボードと、MEGA2560 R3ボードを接続します。
![]()
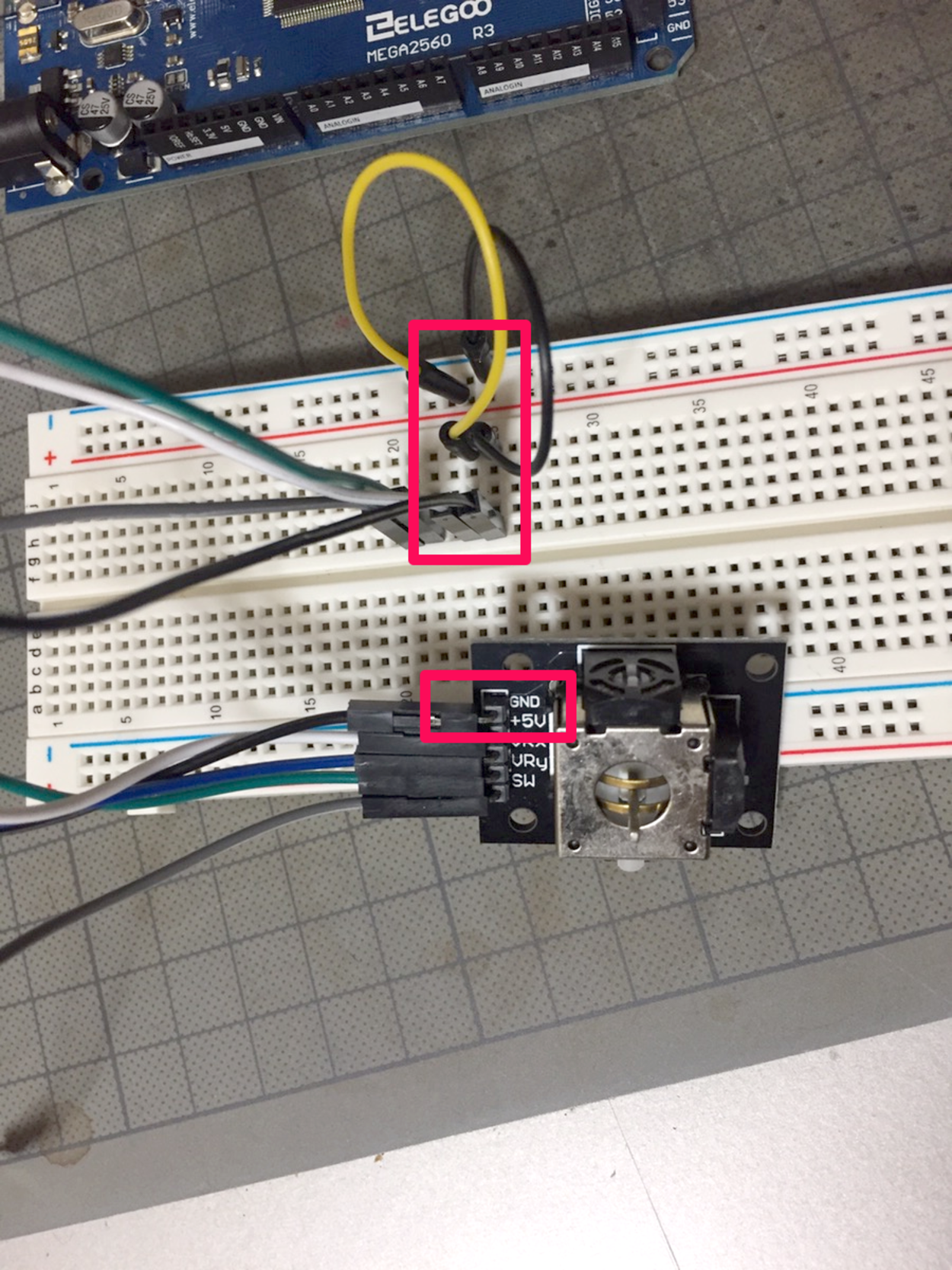
接続する前に、ブレッドボードにジョイスティックにメスからオスのデュポンワイヤーリボンケーブルを接続しましたが、ケーブルの「+5V」と「GND」と、ブレッドボードの「+」と「-」を、オスからオスのジャンパー線を使って接続します。

接続後、ブレッドボードの「+」と「-」に、オスからオスのジャンパー線を接続します。
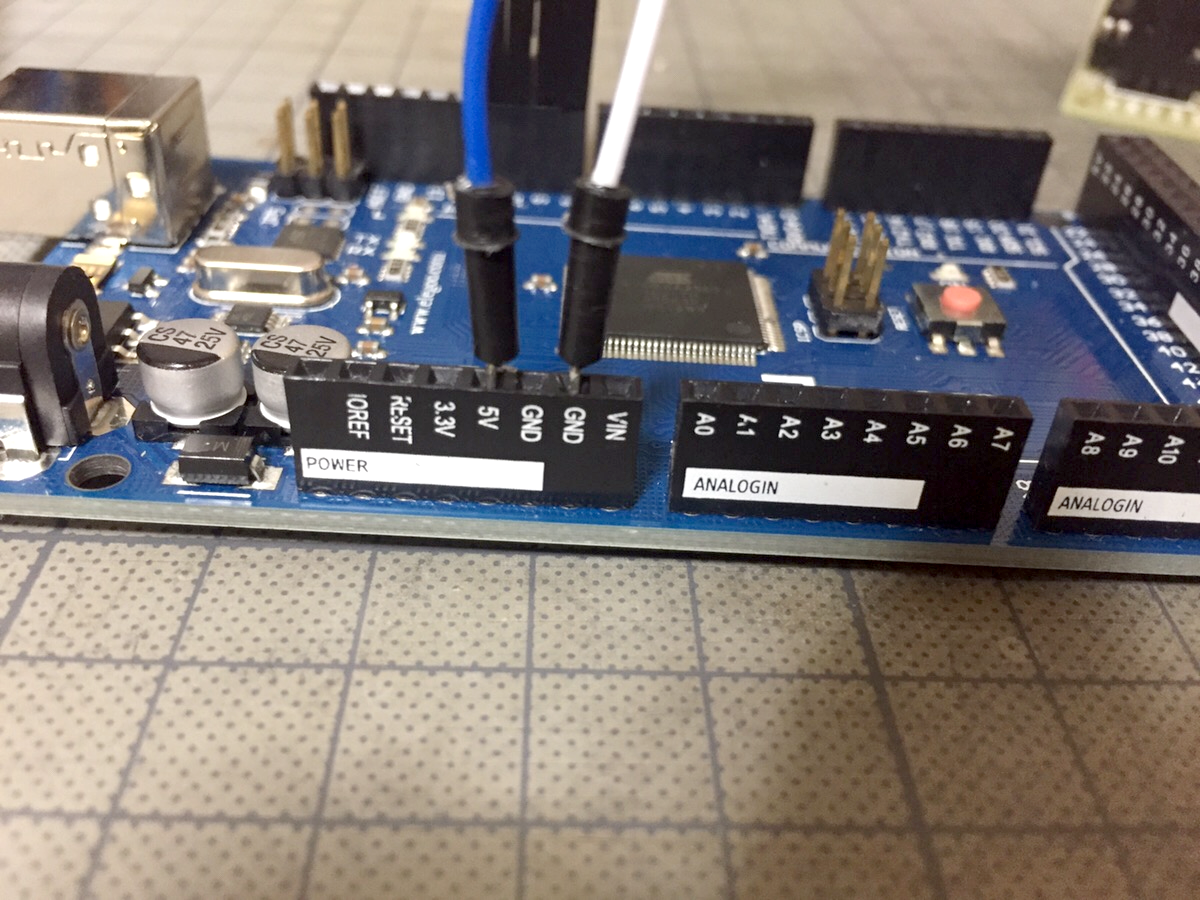
接続後、オスからオスのジャンパー線を、MEGA2560 R3ボードの「5V(+)」、「GND(-)」に接続します。
■アナログジョイスティックと、MEGA2560 R3ボードを接続する
接続後、アナログジョイスティックと、MEGA2560 R3ボードを接続します。
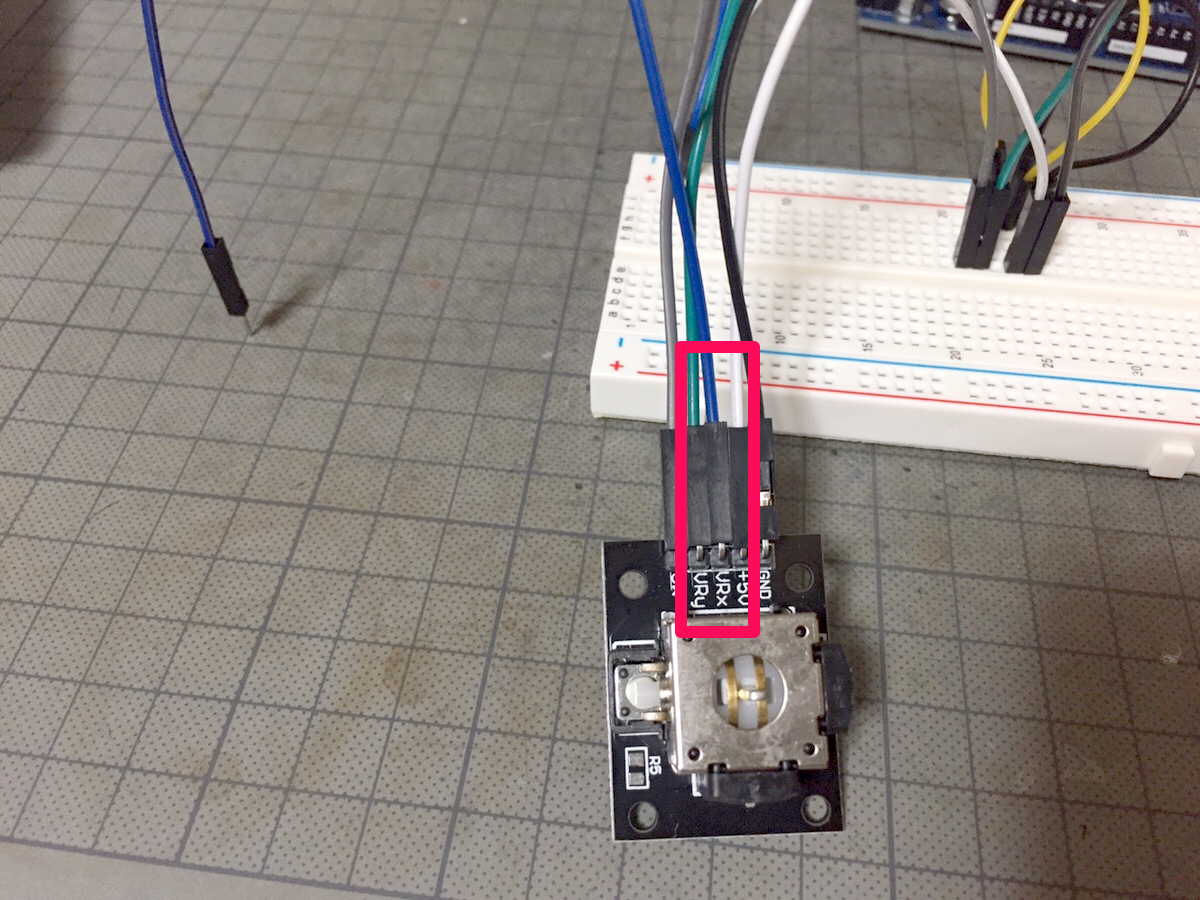
アナログジョイスティックに接続したメスからオスのデュポンワイヤーリボンケーブル「VRx(青色)」は、どこにも接続していませんので、これをMEGA2560 R3ボードに接続します。
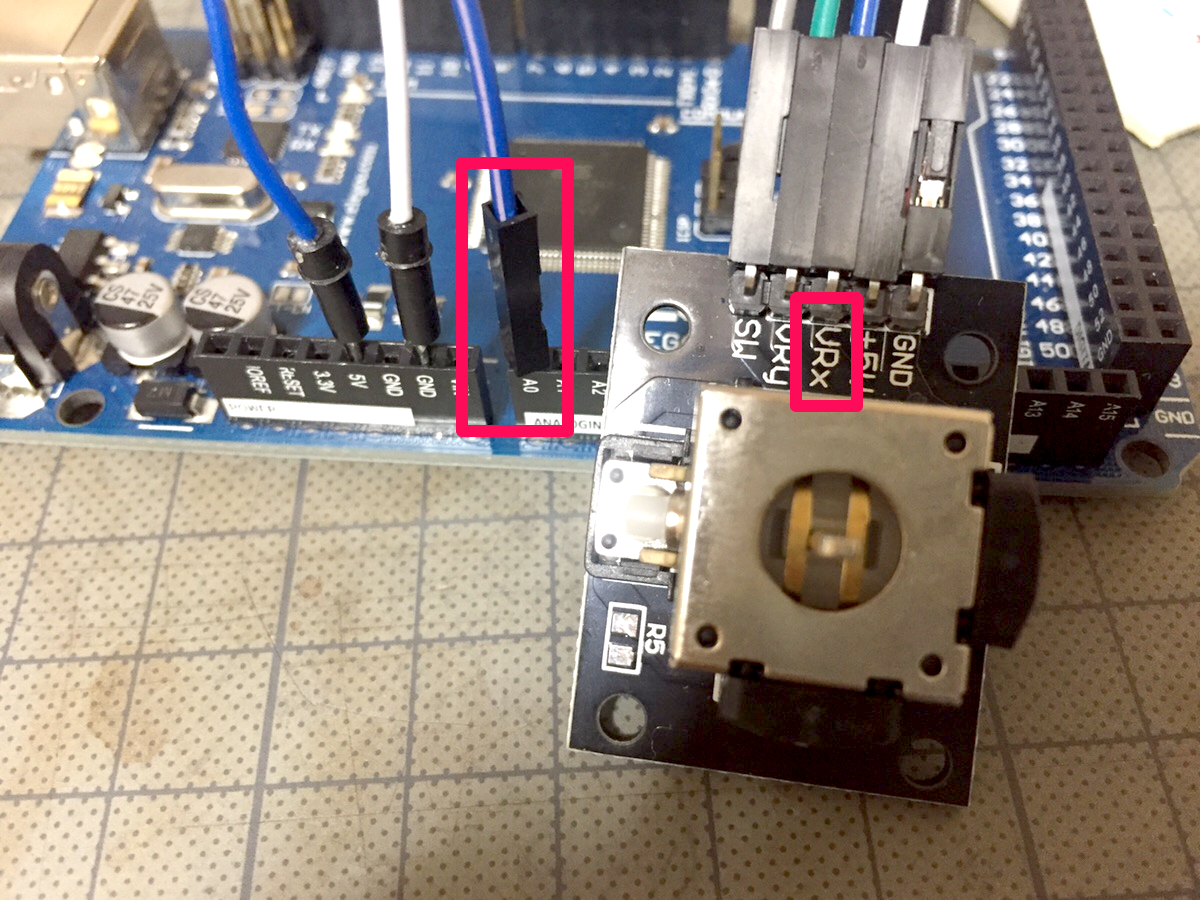
デュポンワイヤーリボンケーブルは、MEGA2560 R3ボードの「A0」に接続します。
■Elegoo MEGA2560 R3ボードをPC(パソコン)に接続する
接続後、Elegoo MEGA2560 R3ボードをUSBケーブルを使って、PC(パソコン)に接続する。
■新しいファイルにコードを書き、マイコンボードに書き込む
接続後、Windows10にインストールしてある「Arduino」が起動します。
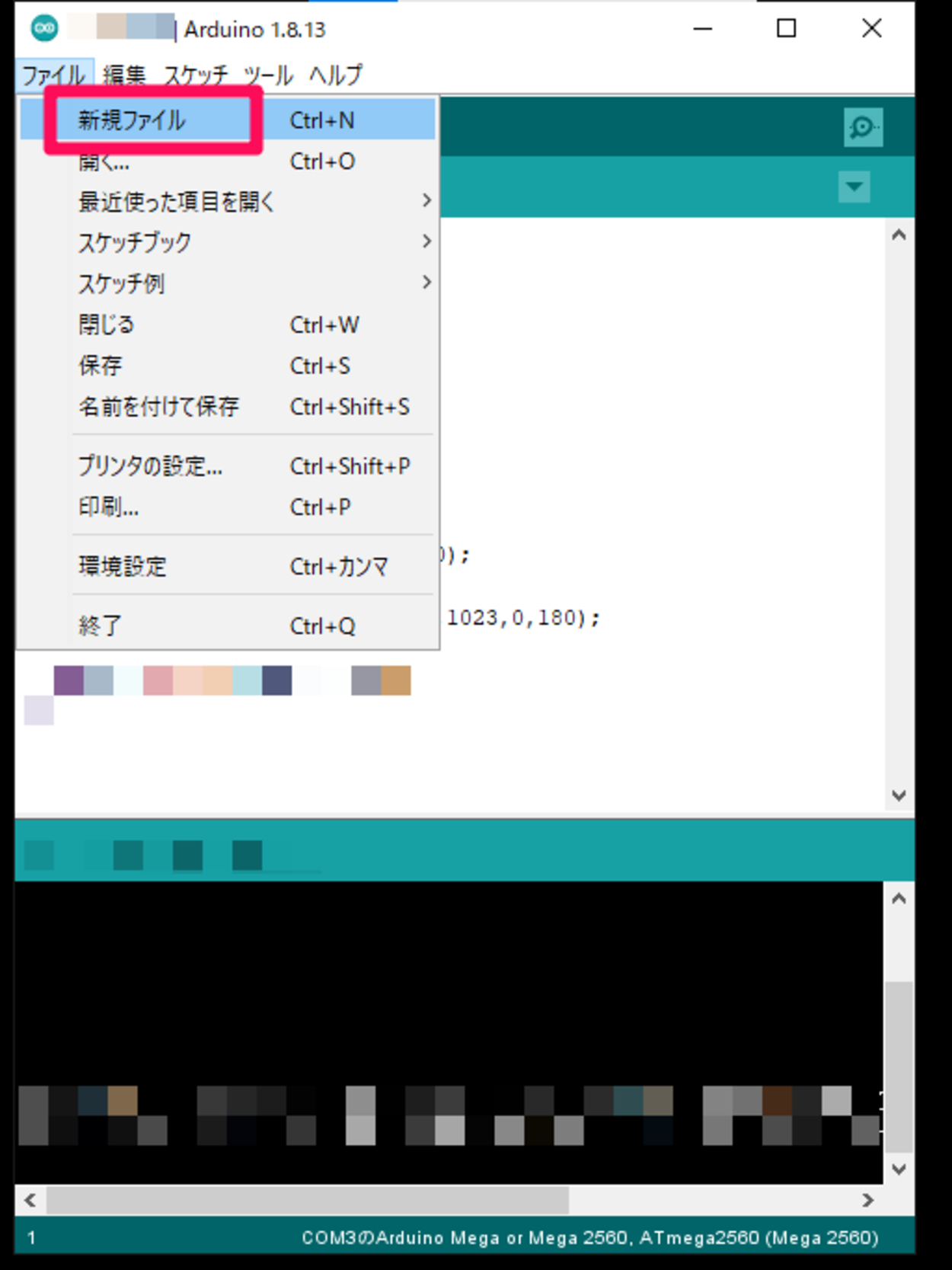
起動すると、「Arduino」のウインドウ内の「ファイル」から「新規ファイル」をクリックします。
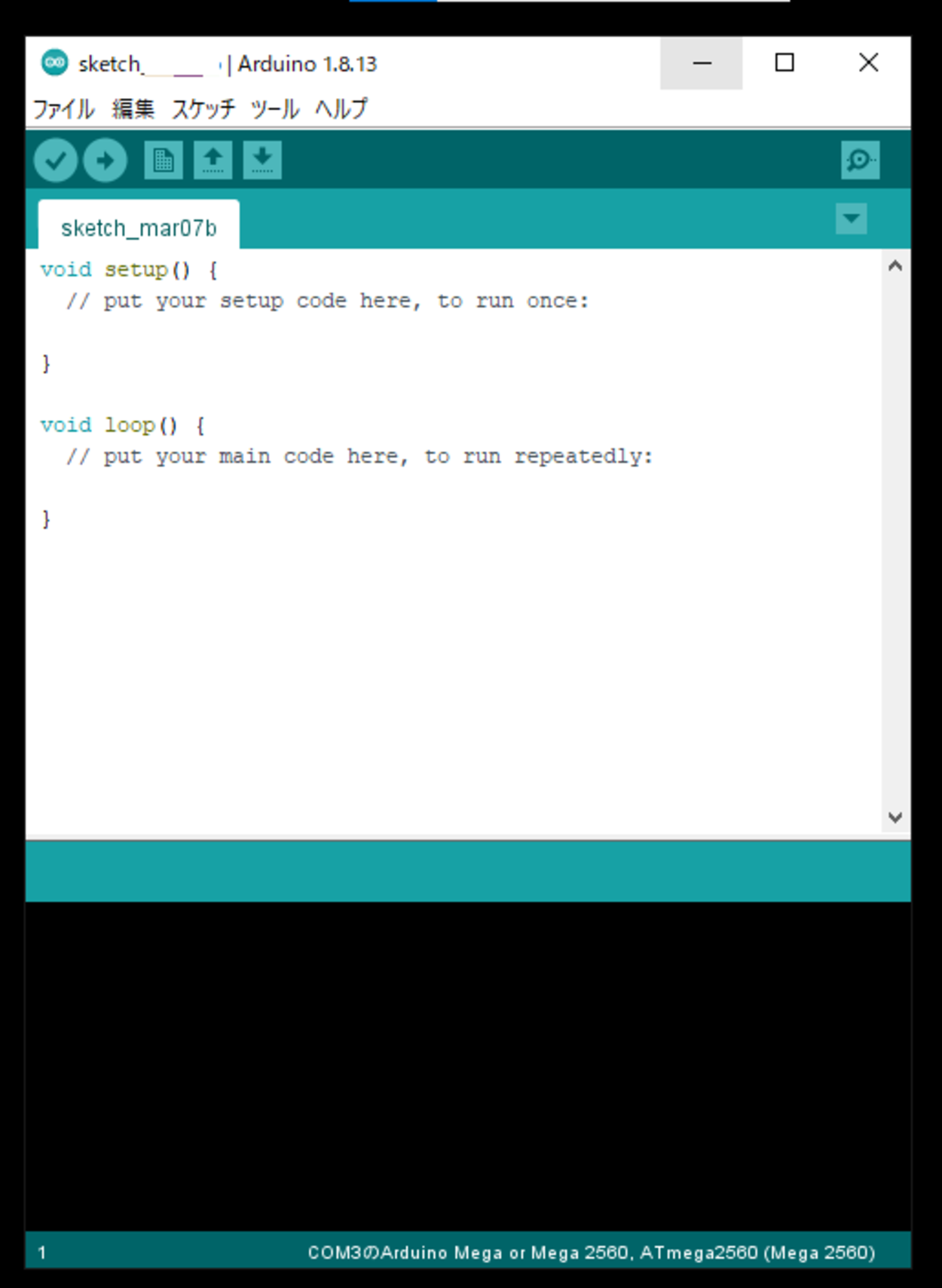
クリックすると、新規のファイル(スケッチ)が作成されますので、ファイル(スケッチ)内にアナログジョイスティックモジュールでステッピングモーターの制御のコードを書いていきます。
■コード
今回は、こちらのプロジェクトのコードを使わせていただきます(https://simple-circuit.com/arduino-stepper-motor-joystick-control/)。
このコードは、“Stepper”というライブラリが必要となります。
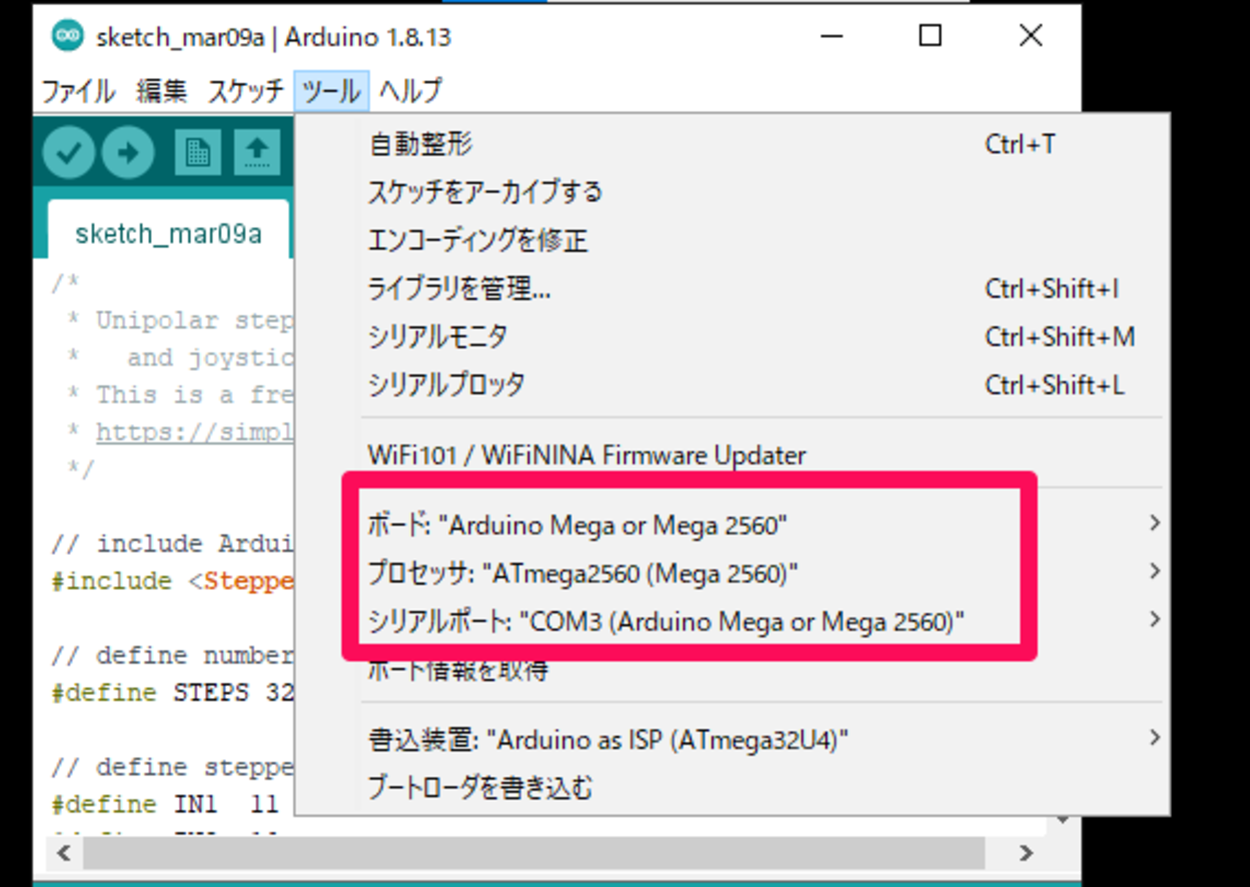
書き込む前に、「Arduino」ウインドウ内の「ツール」をクリックし、「ボード」、「プロセッサ」、「シリアルポート」が、「MEGA2560」と表示されてWindows10に認識されているかを確認します。
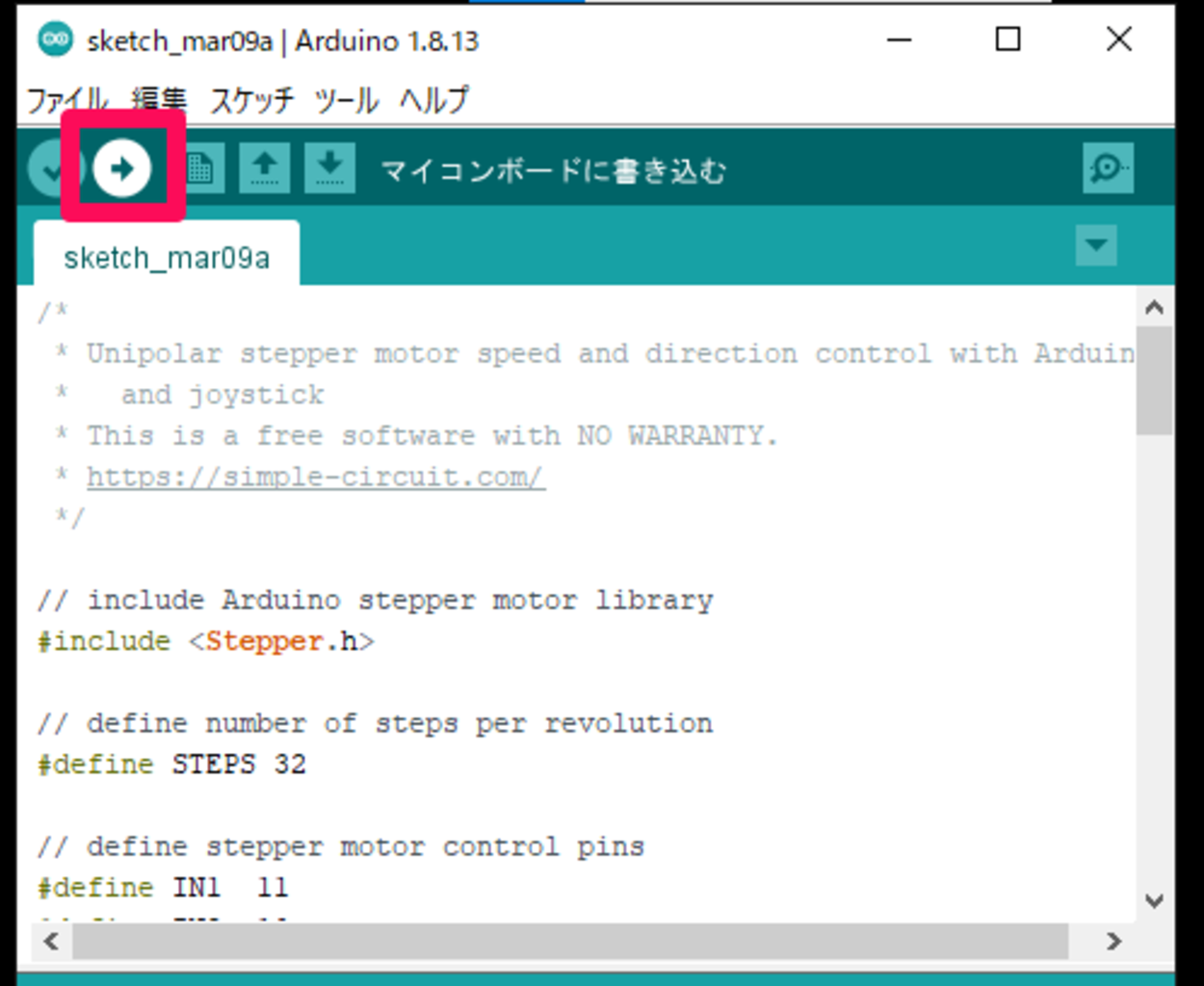
確認後、「Arduino」ウインドウ内の上部にある「マイコンボードに書き込む・書込装置を使って書き込み」ボタンをクリックします。
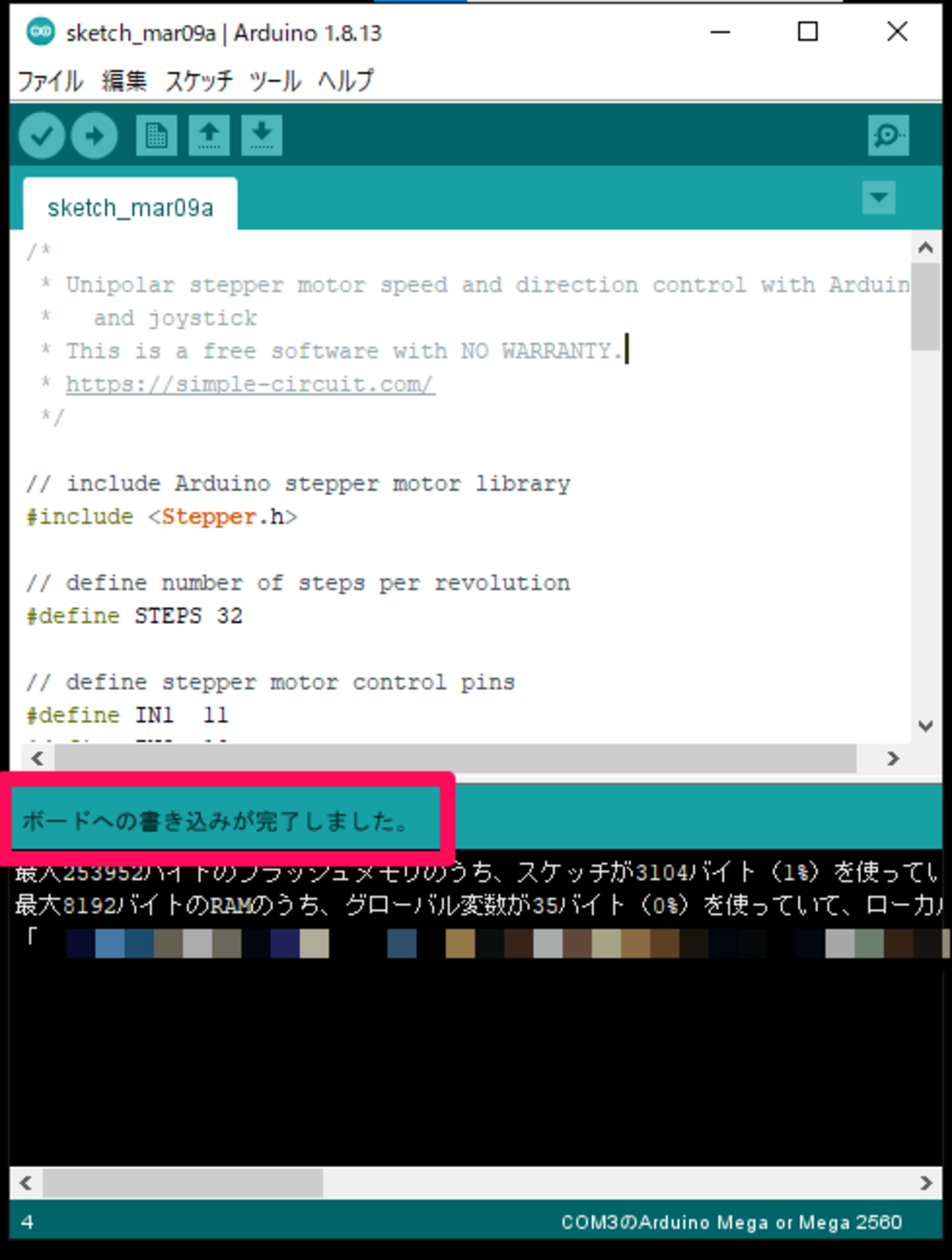
クリックすると、Elegoo MEGA2560 R3ボードにファイル(スケッチ)が書き込まれ、「Arduino」ウインドウ内の下に「ボードへの書き込みが完了しました。」と表示されます。これで書き込みは完了となります。
■アナログジョイスティックモジュールによるステッピングモーターの制御ができるのか検証
書き込み後、アナログジョイスティックモジュールによるステッピングモーターの制御ができるのかの検証を行いました。
検証を行いましたが、アナログジョイスティックモジュールを操作すると、それに応じてステッピングモーターが動くことを確認できました。
コメント