Arduino Elegoo MEGA2560 R3ボードでフォトレジスタ(光センサー)によるサーボモーターの制御を行ってみます。
■用意したもの
・Arduinoバージョン1.8.13がインストールされているPC(Windows10)
・Elegoo MEGA2560 R3ボード、1個(https://amzn.to/33ytufU)

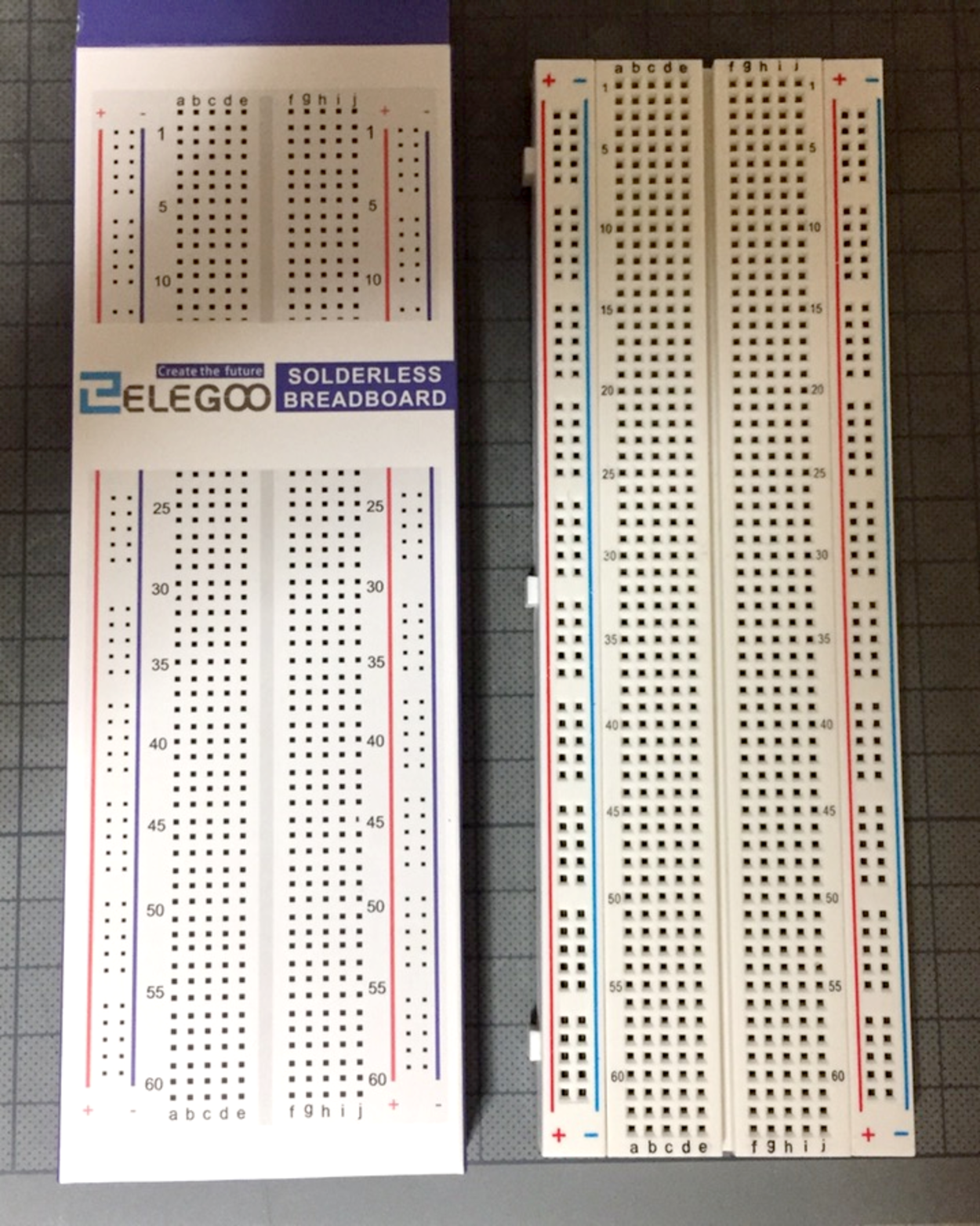
・BREADBOARD(ブレットボード) MB-102、1個(https://amzn.to/3bhu0mW)
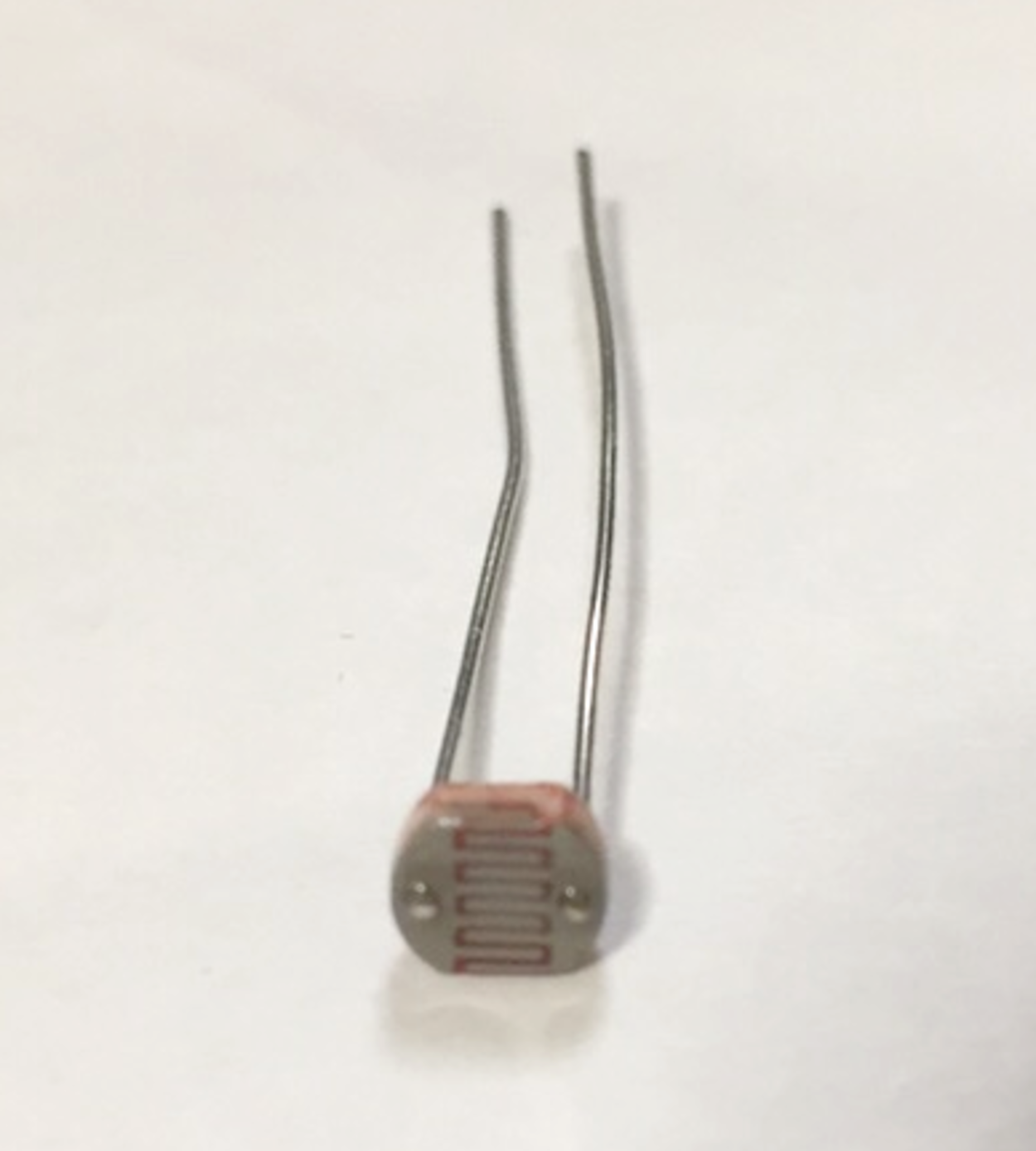
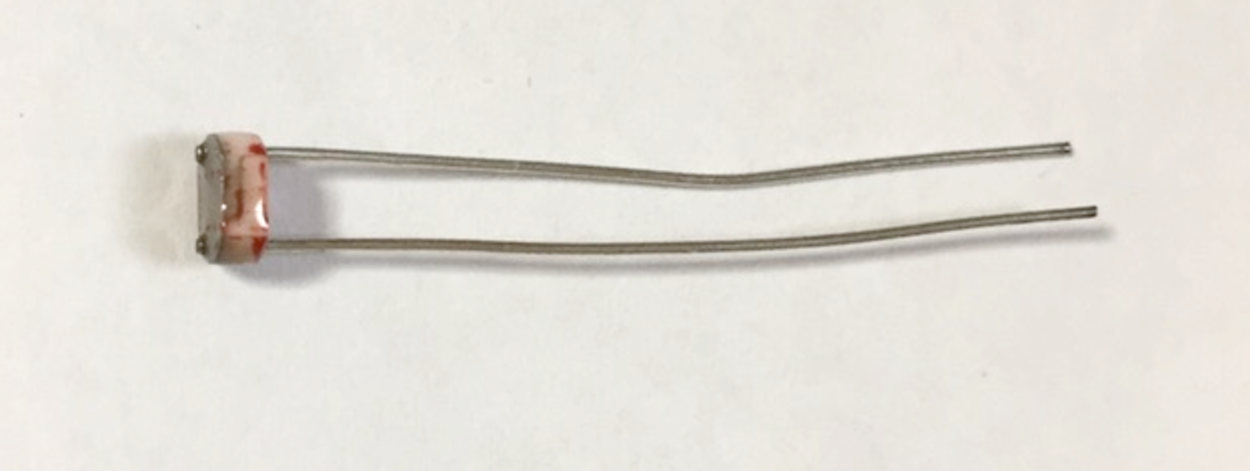
・フォトレジスタ(フォトセル)、Photoresistor (Photocell)、1個(https://amzn.to/30fYNdF)
・SG90(Arduinoミニサーボモーター)、1つ(https://amzn.to/2OrX423)

本体には「Micro Servo 9g SG90」と記載されています。
・10K ohm resistor(抵抗器)、1個(https://amzn.to/3kQwOKR)
・オス – オス ジャンパー線(ジャンパーワイヤ)(M-M wires (Male to Male jumper wires))、8つ(https://amzn.to/2MPDLPK)
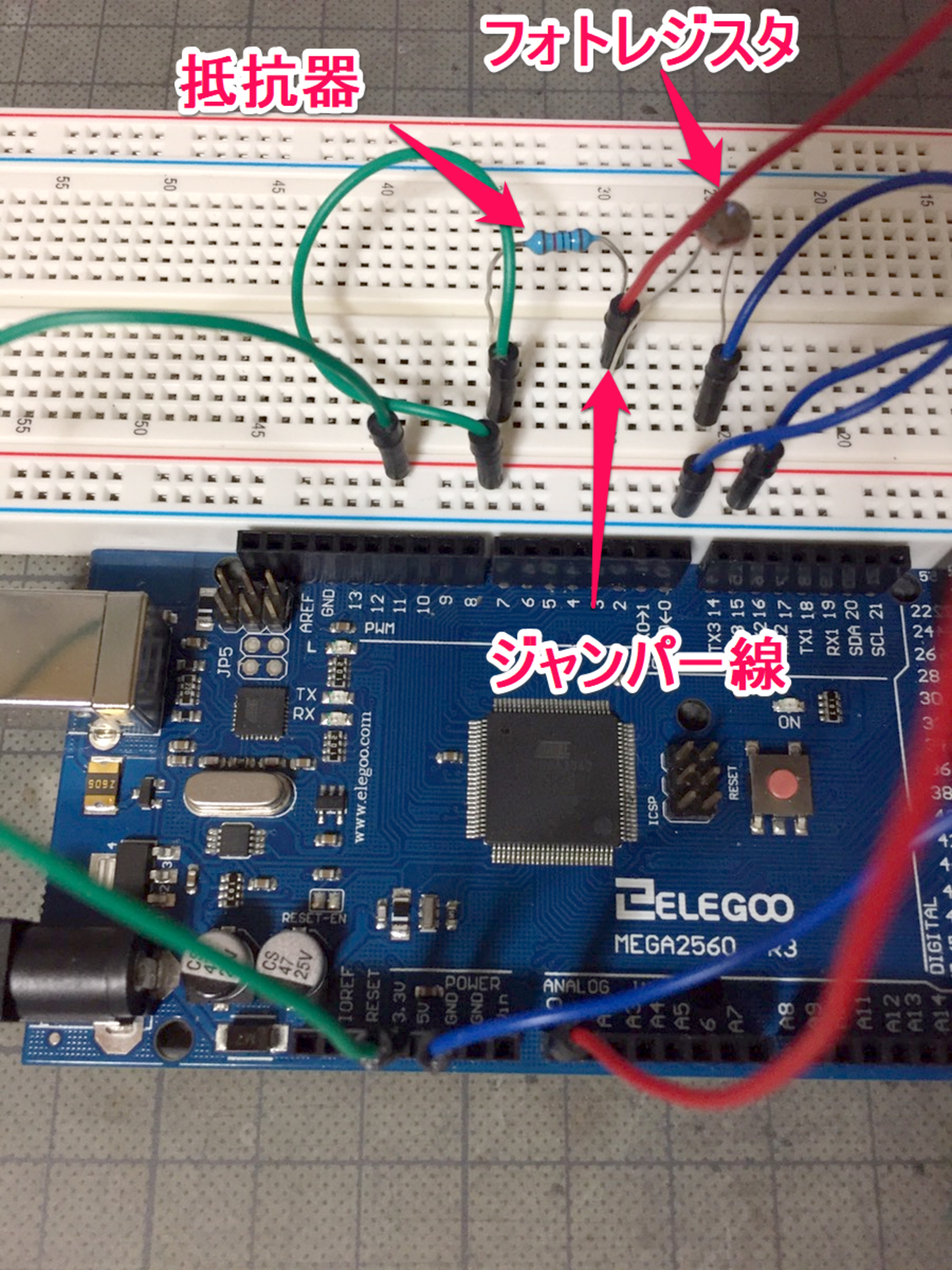
■ブレットボードにフォトレジスタ(光センサー)などを接続する
それでは、フォトレジスタ(光センサー)によるサーボモーターの制御しますので、まずはブレットボードとフォトレジスタ(光センサー)などを接続していきます。
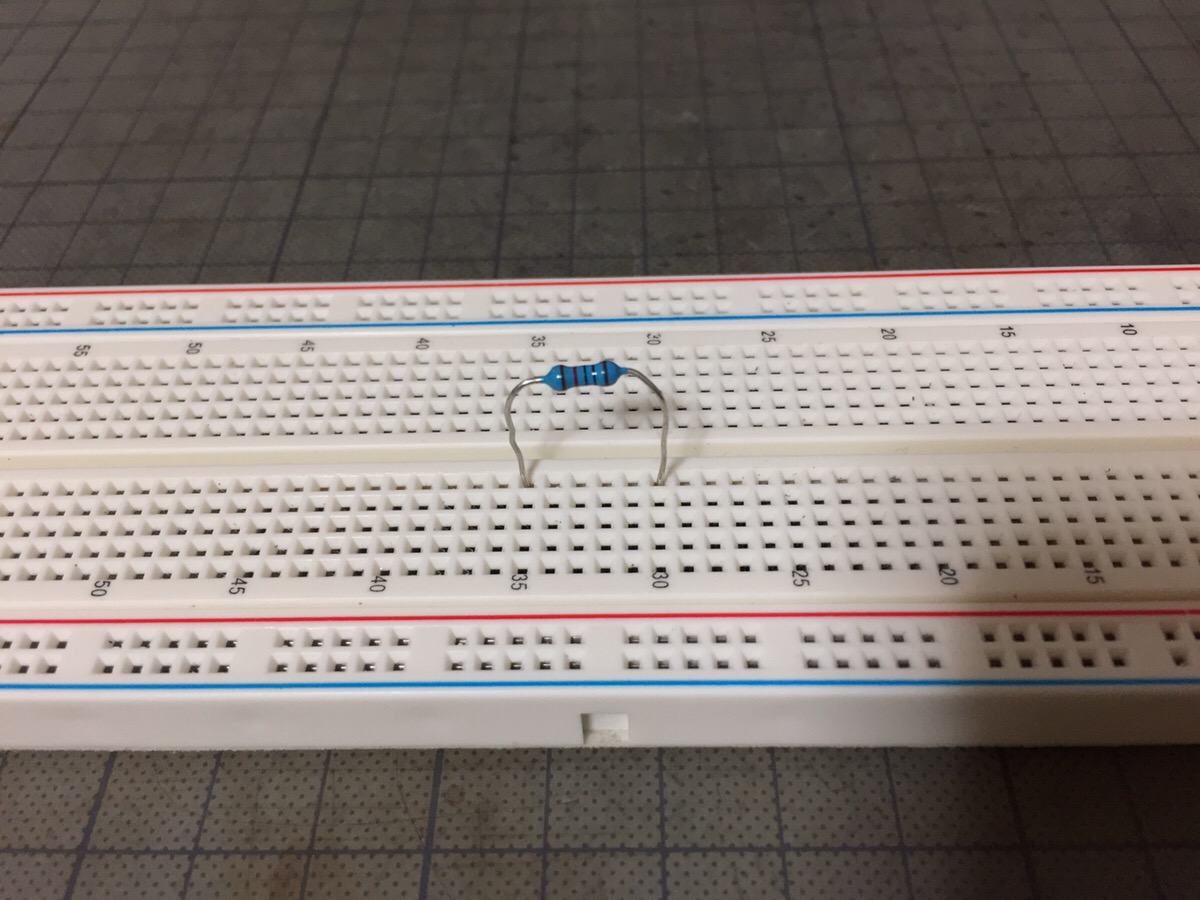
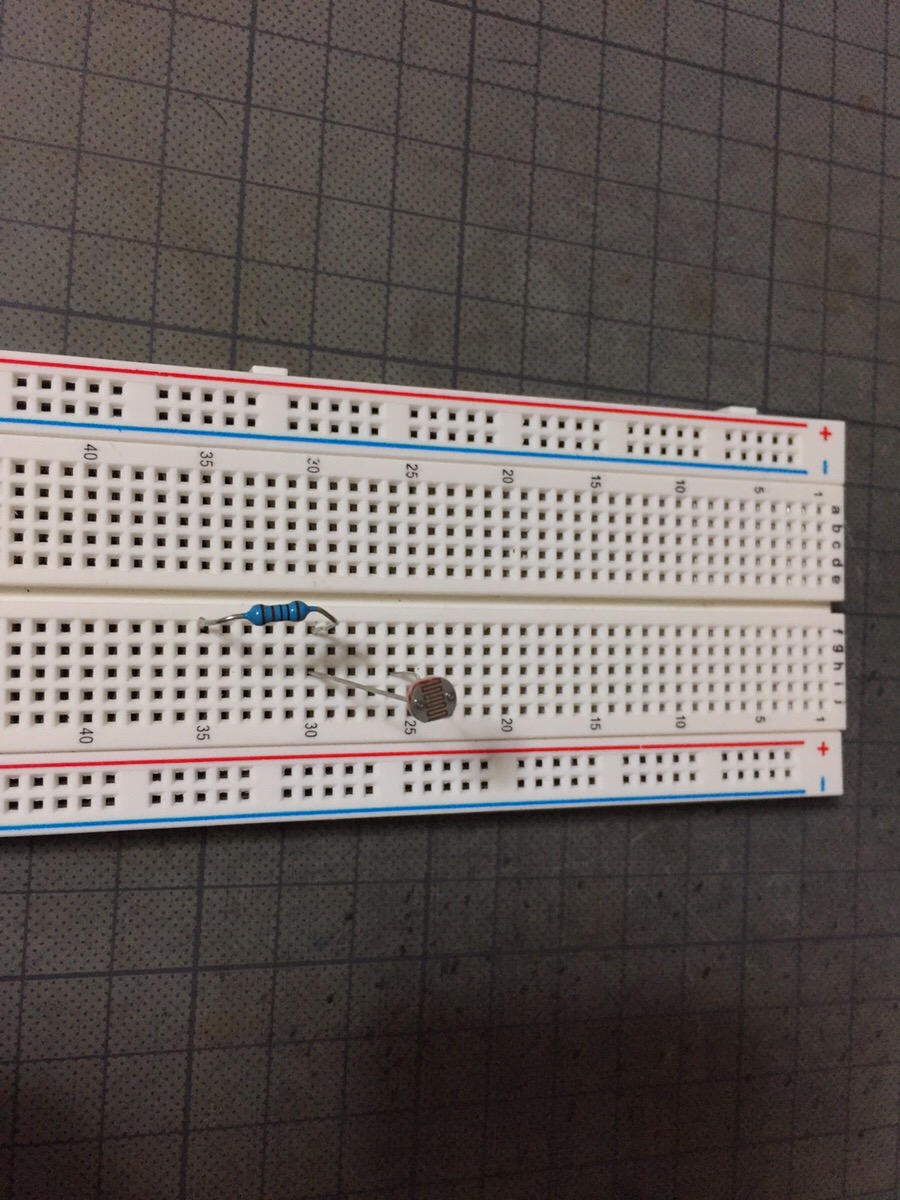

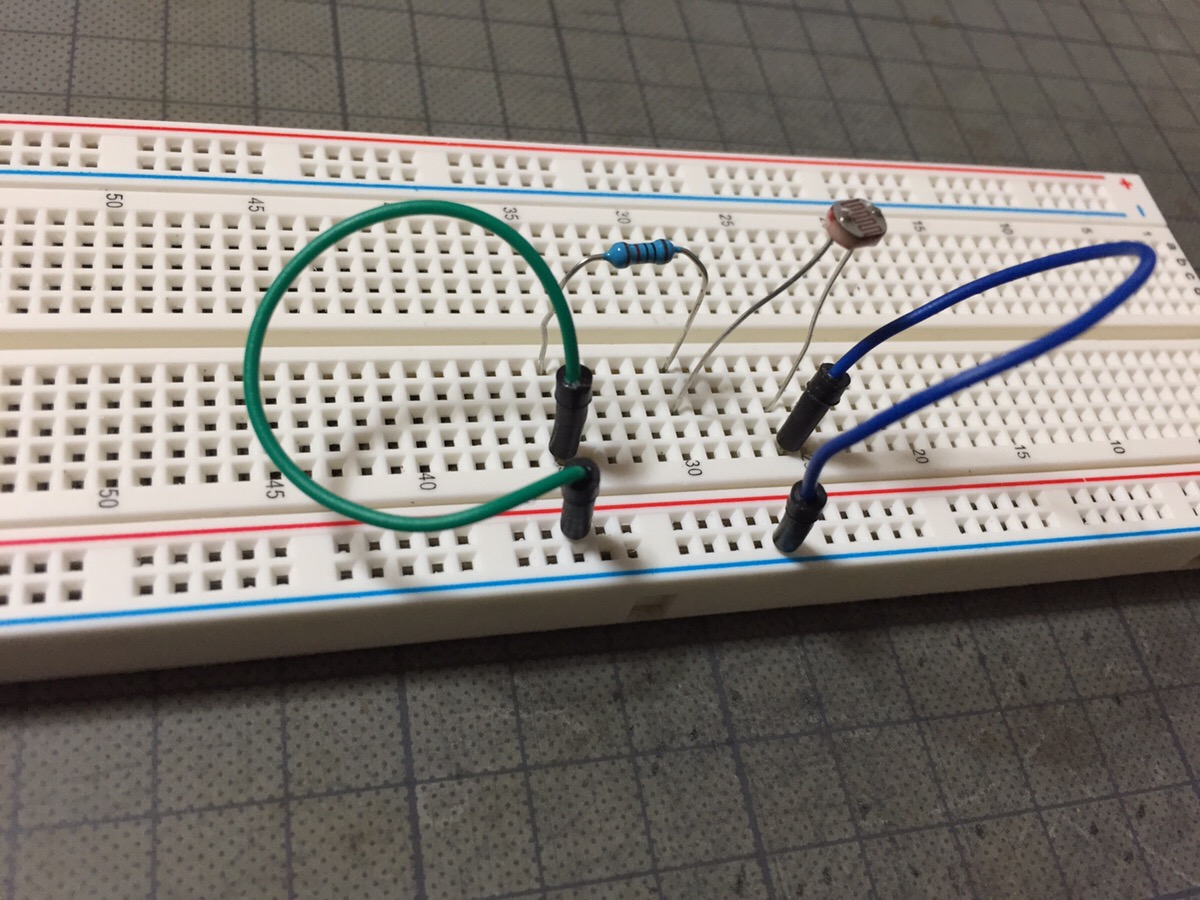
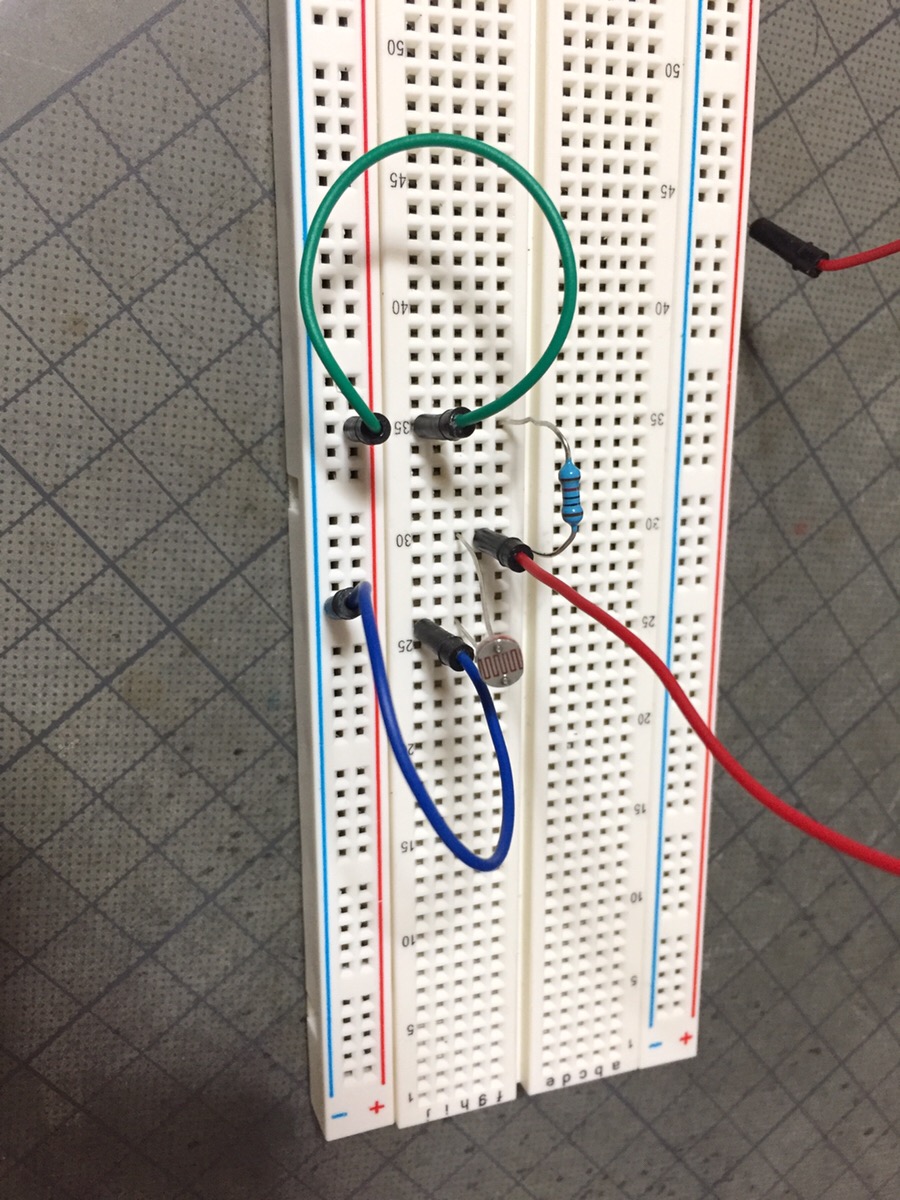
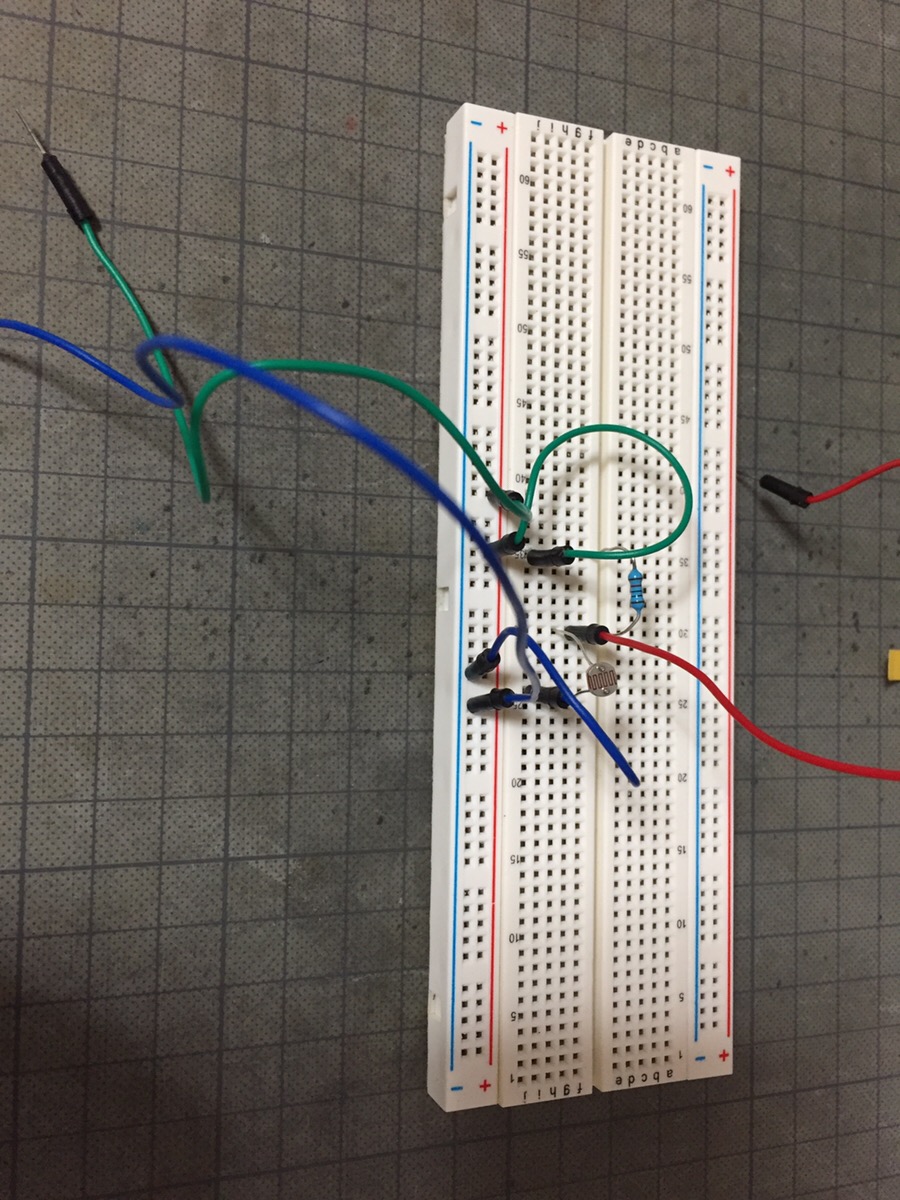
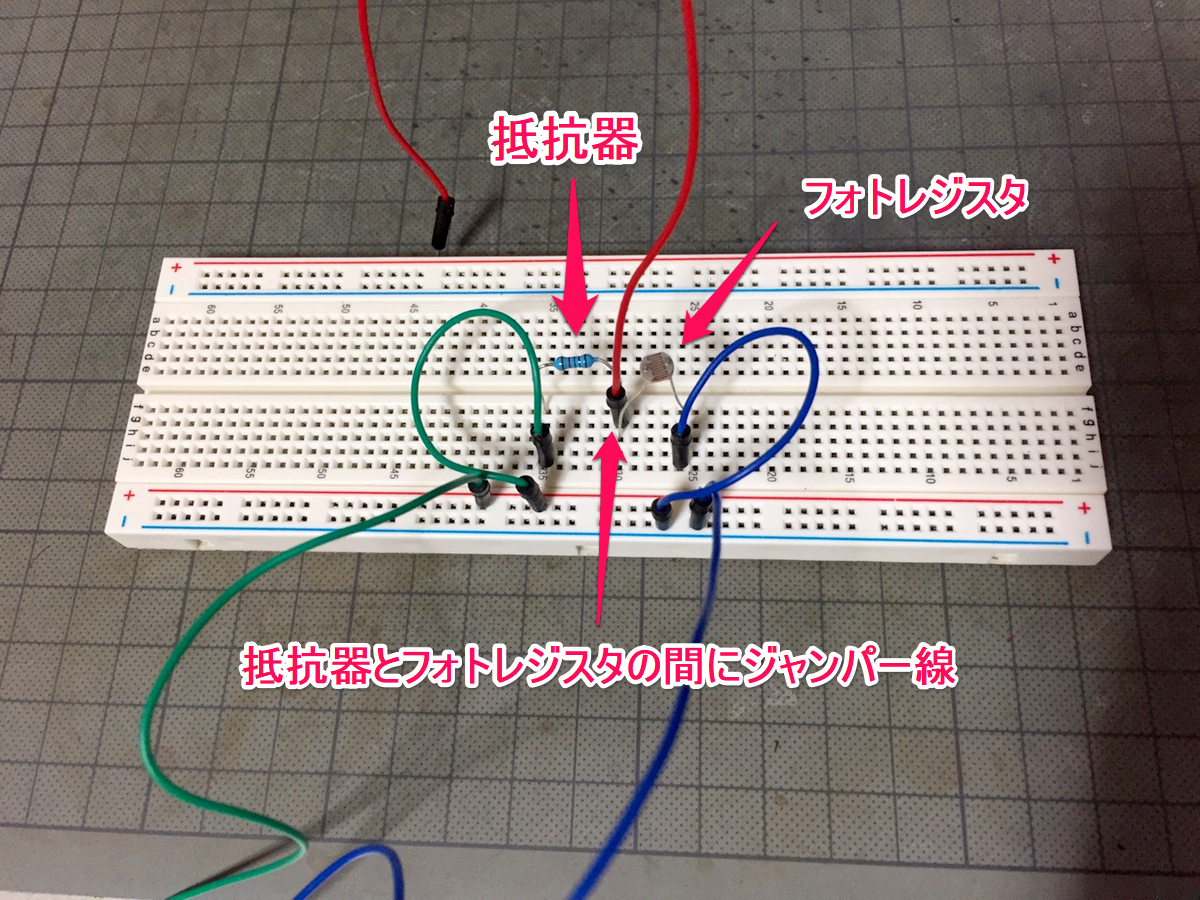
フォトレジスタ(光センサー)などを上記のような形で、配線を間違えないに気をつけながら接続していきます。
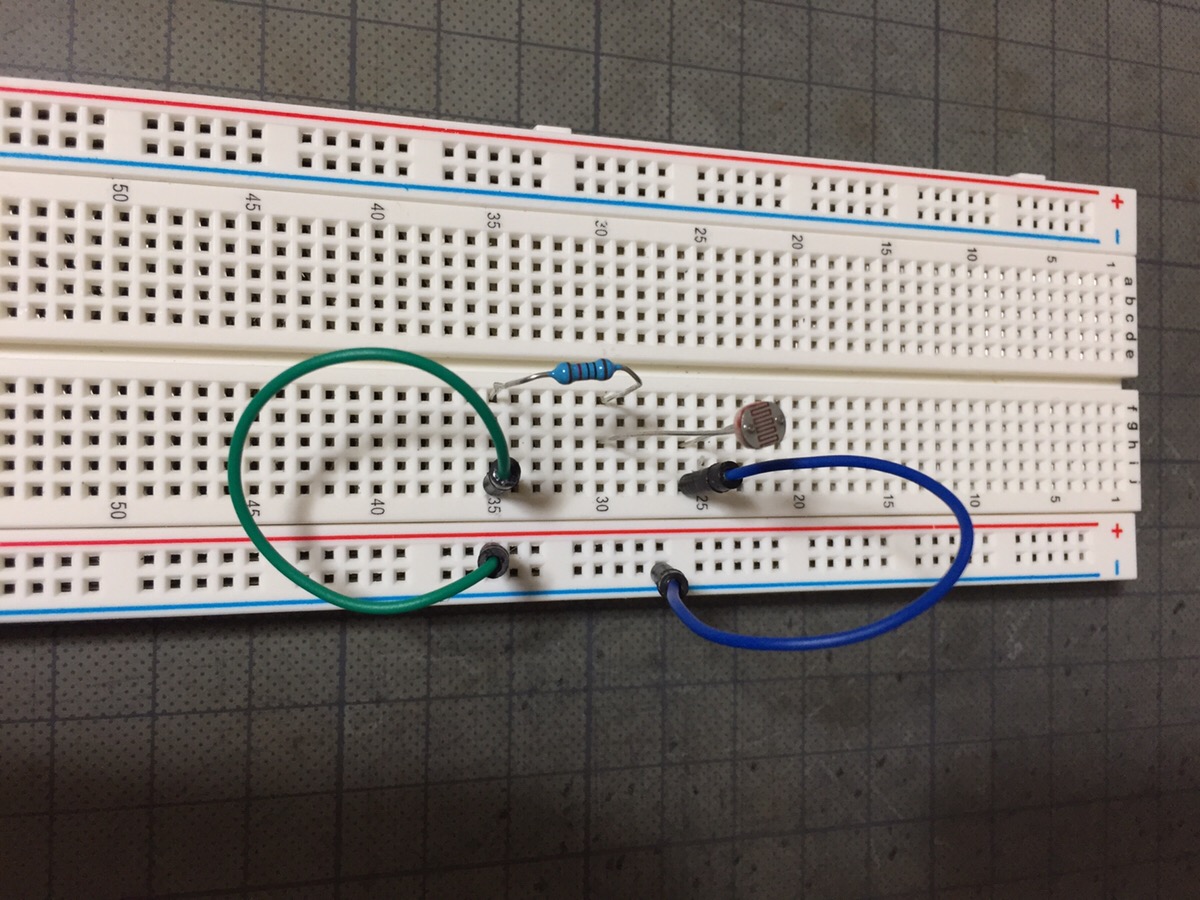
■ブレットボードとElegoo MEGA2560 R3ボードを接続する
接続した後は、ブレットボードとElegoo MEGA2560 R3ボードを、オス – オス ジャンパー線で接続します。


+(プラス)に接続したジャンパー線を、「3.3V」に接続。ー(マイナス)に接続したジャンパー線を「GND」に接続。
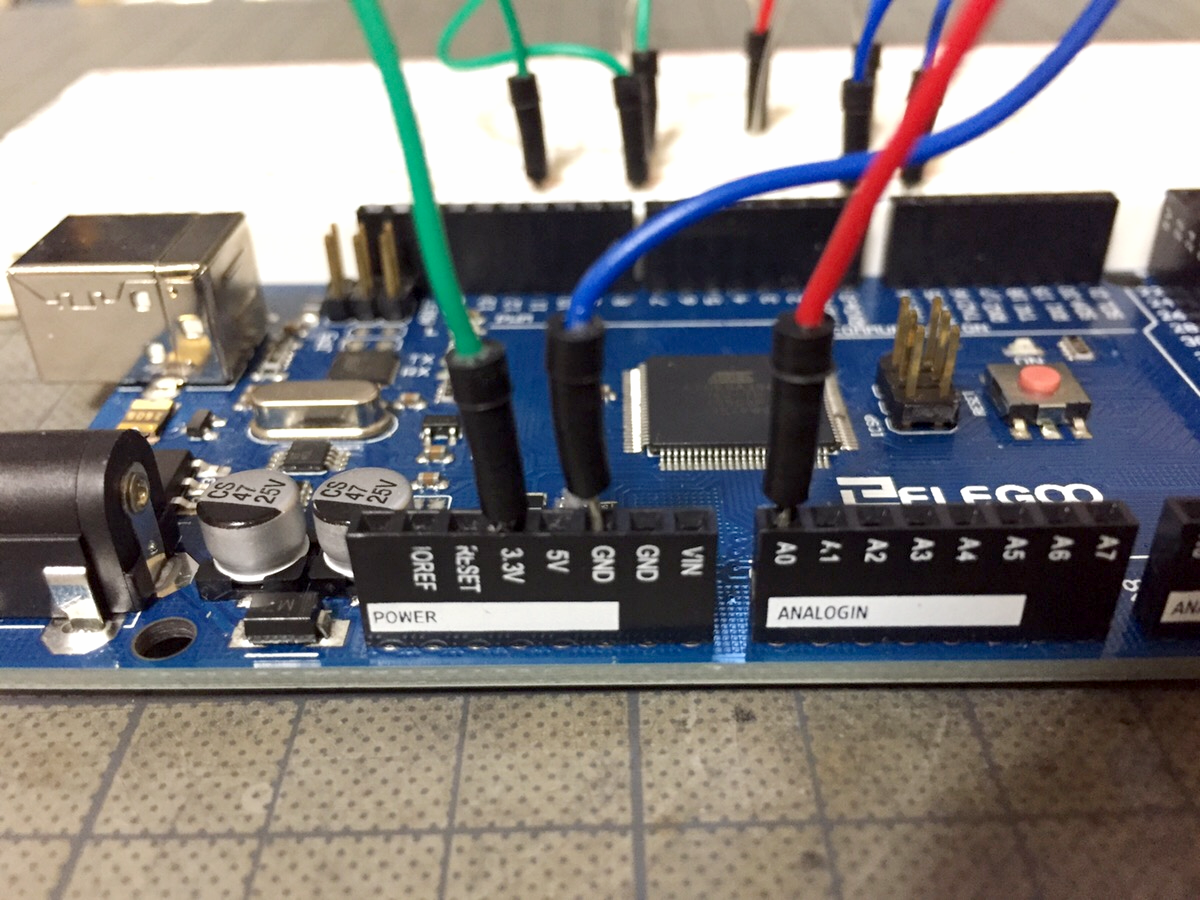
抵抗器とフォトレジスタの間に接続したジャンパー線を、「A0」に接続。
■サーボモーターとElegoo MEGA2560 R3ボードを接続する
接続後、サーボモーターとElegoo MEGA2560 R3ボードを接続します。
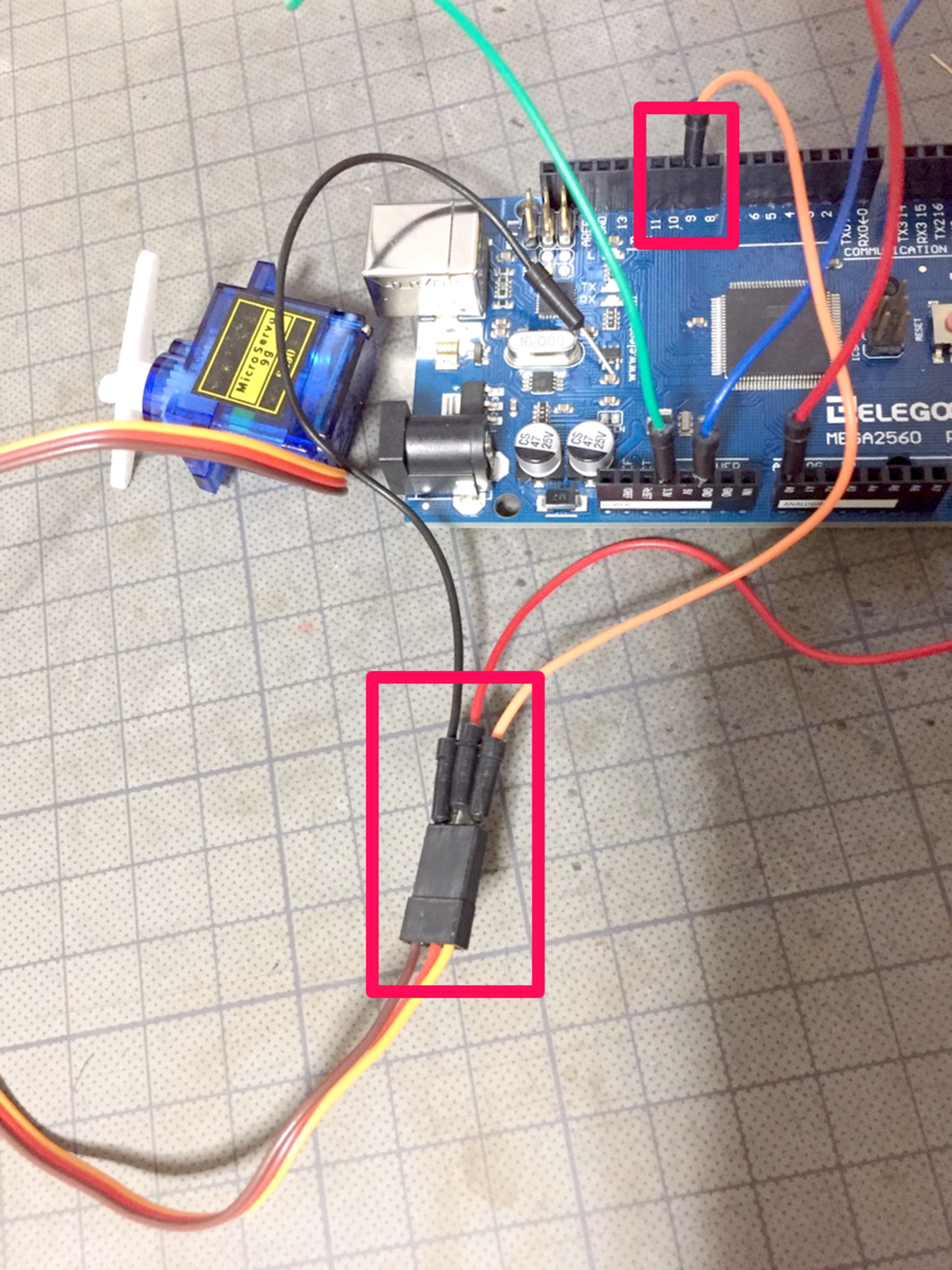
サーボモーターのオレンジ色(ジャンパー線:オレンジ色)を、「9」に接続。
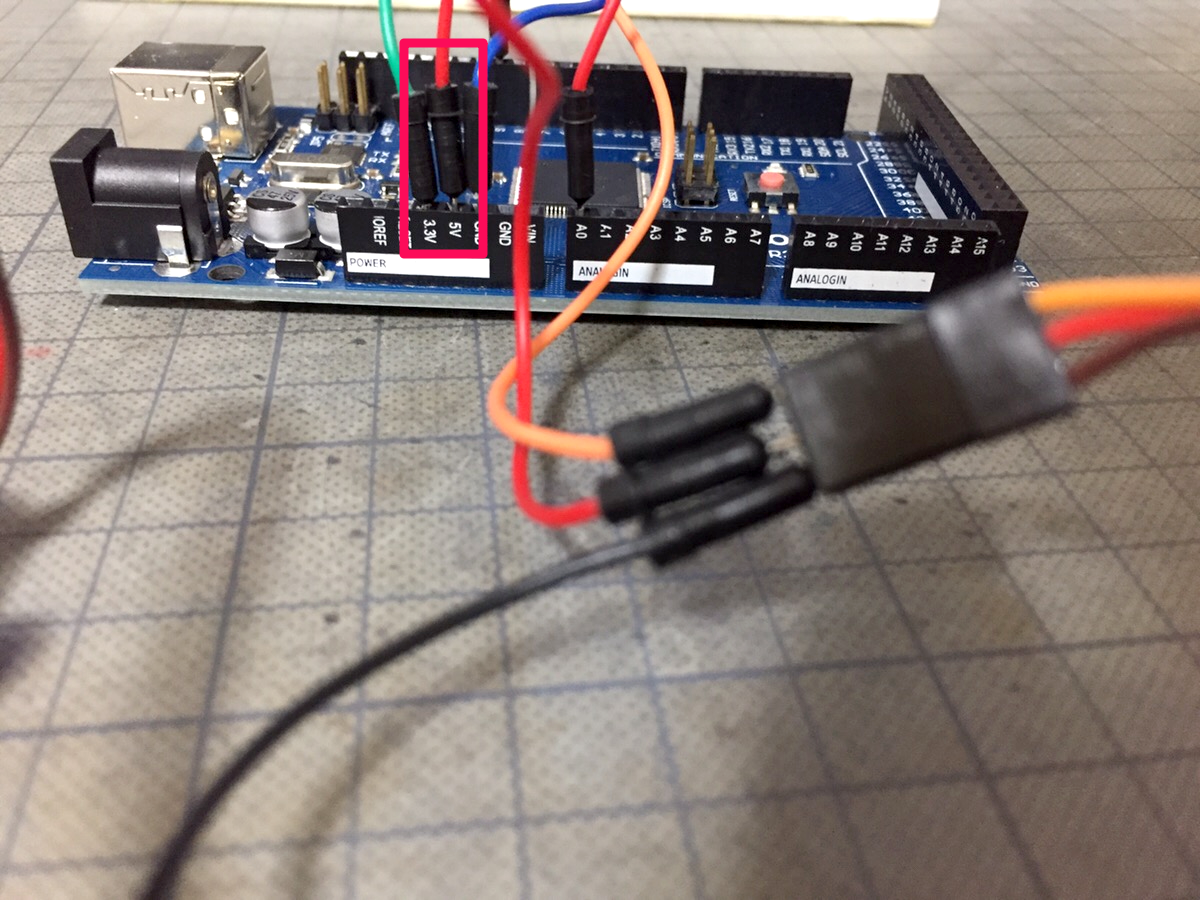
サーボモーターの赤色(ジャンパー線:赤色)を、「5V」に接続。
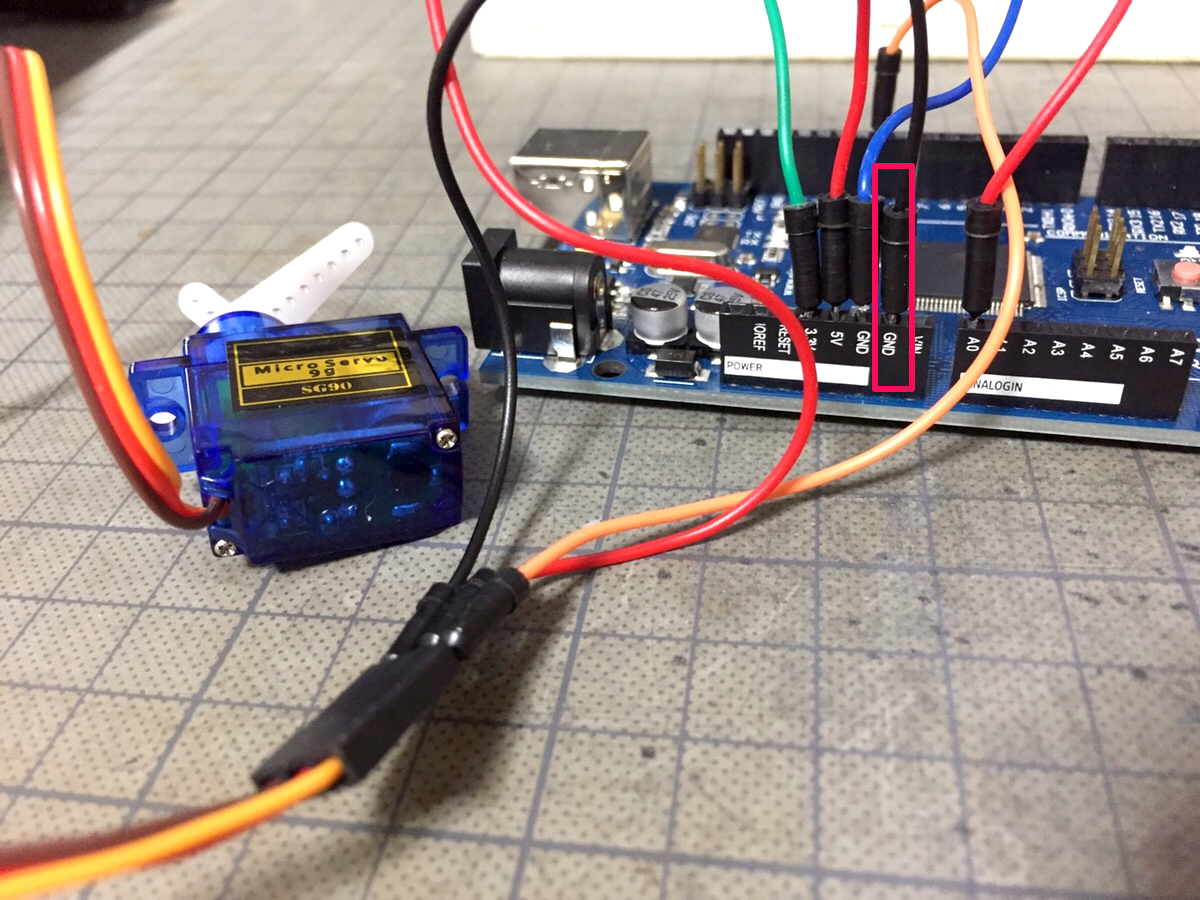
サーボモーターの茶色(ジャンパー線:黒色)を、「GND」に接続。
■Elegoo MEGA2560 R3ボードをPC(パソコン)に接続する
接続後、Elegoo MEGA2560 R3ボードをUSBケーブルを使って、PC(パソコン)に接続する。
■コードを書き、マイコンボードへ書き込む
接続後、Windows10にインストールしてある「Arduino」が起動します。
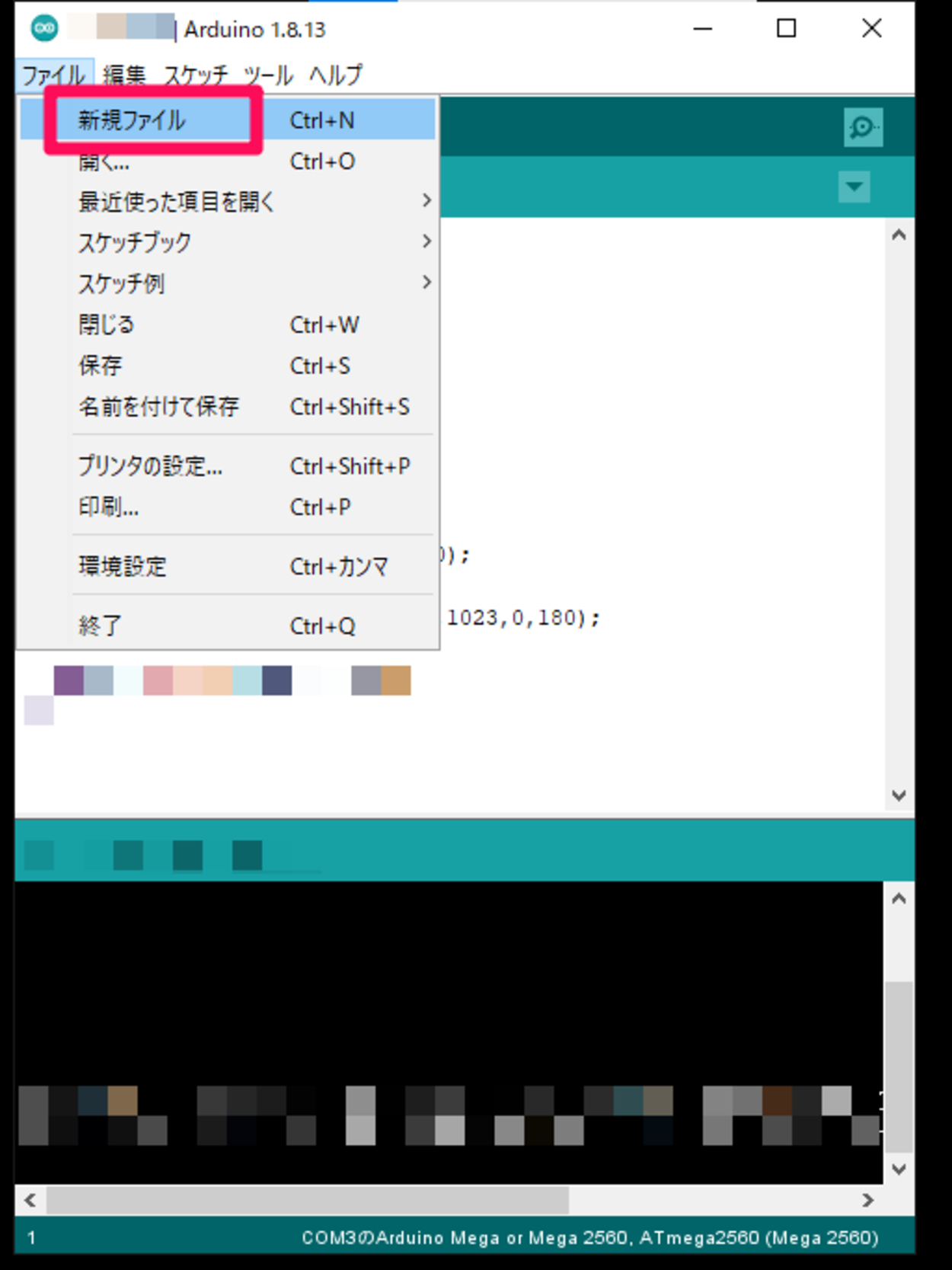
起動すると、「Arduino」のウインドウ内の「ファイル」から「新規ファイル」をクリックします。
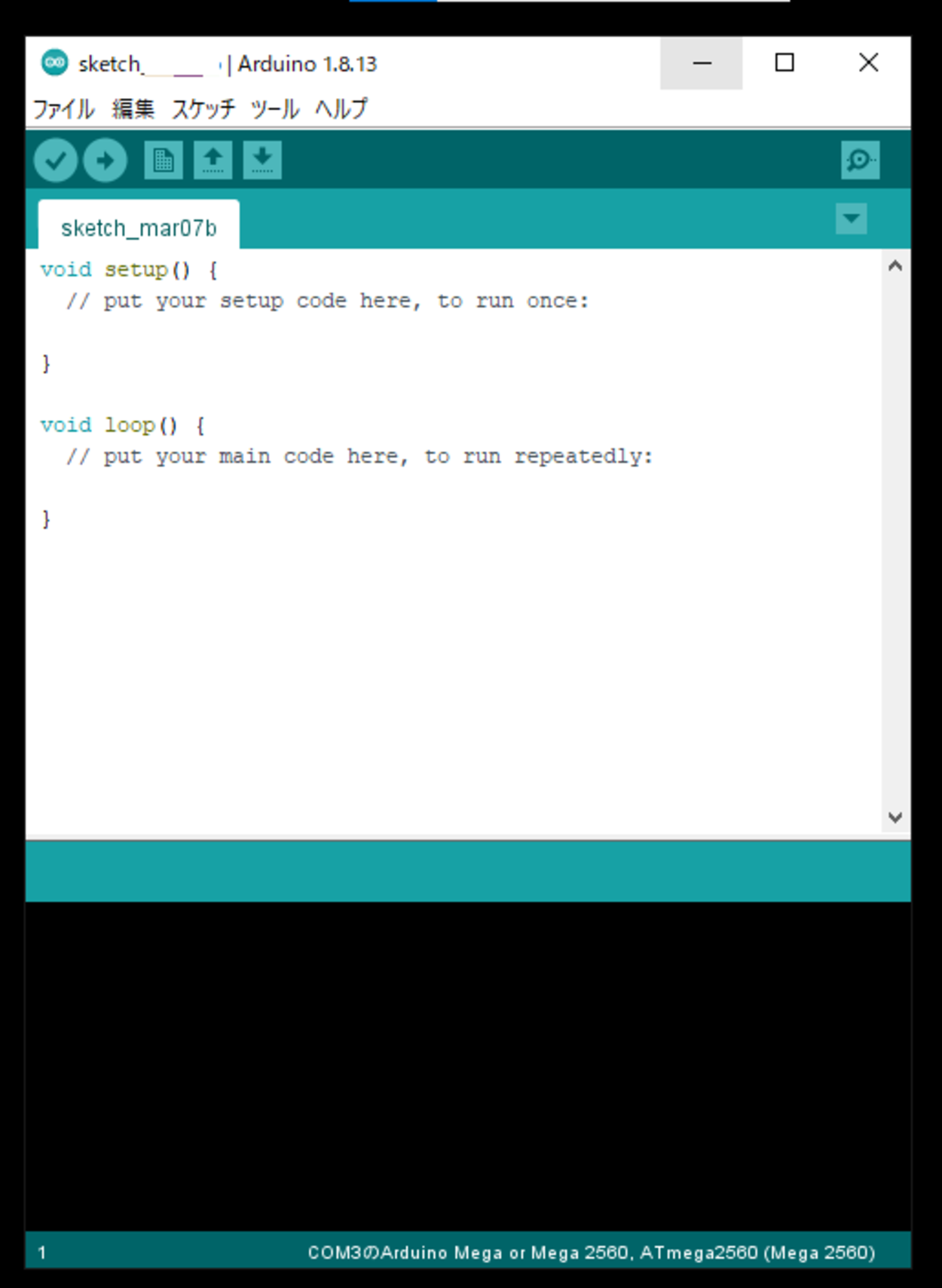
クリックすると、新規のファイル(スケッチ)が作成されますので、ファイル(スケッチ)内にフォトレジスタ(光センサー)によるサーボモーターの制御のコードを書いていきます。
■コード
今回は上記のコードを書きました。このコードは、“Servo”というライブラリが必要となります。
コードを書いた後は、作成したファイル(スケッチ)をElegoo MEGA2560 R3ボードに書き込みします。
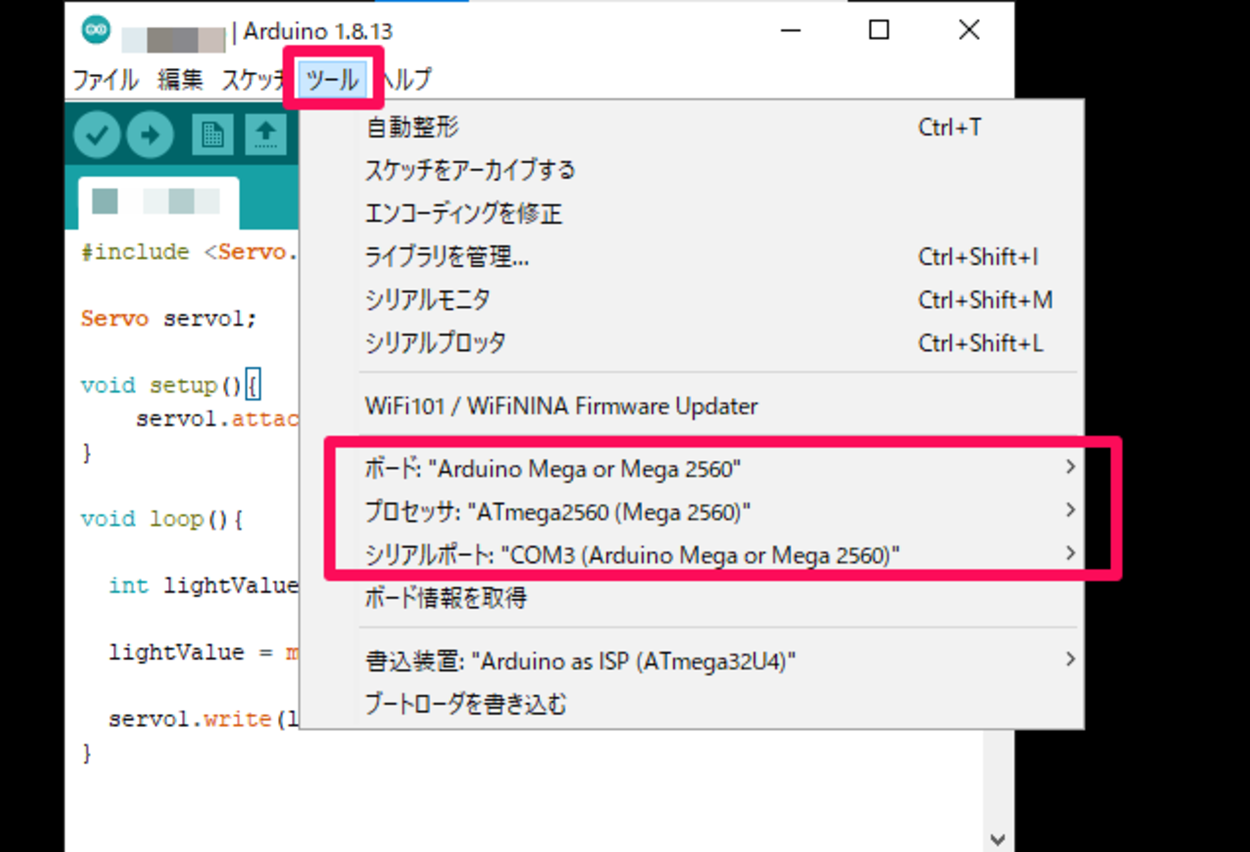
書き込む前に、「Arduino」ウインドウ内の「ツール」をクリックし、「ボード」、「プロセッサ」、「シリアルポート」が、「MEGA2560」と表示されてWindows10に認識されているかを確認します。
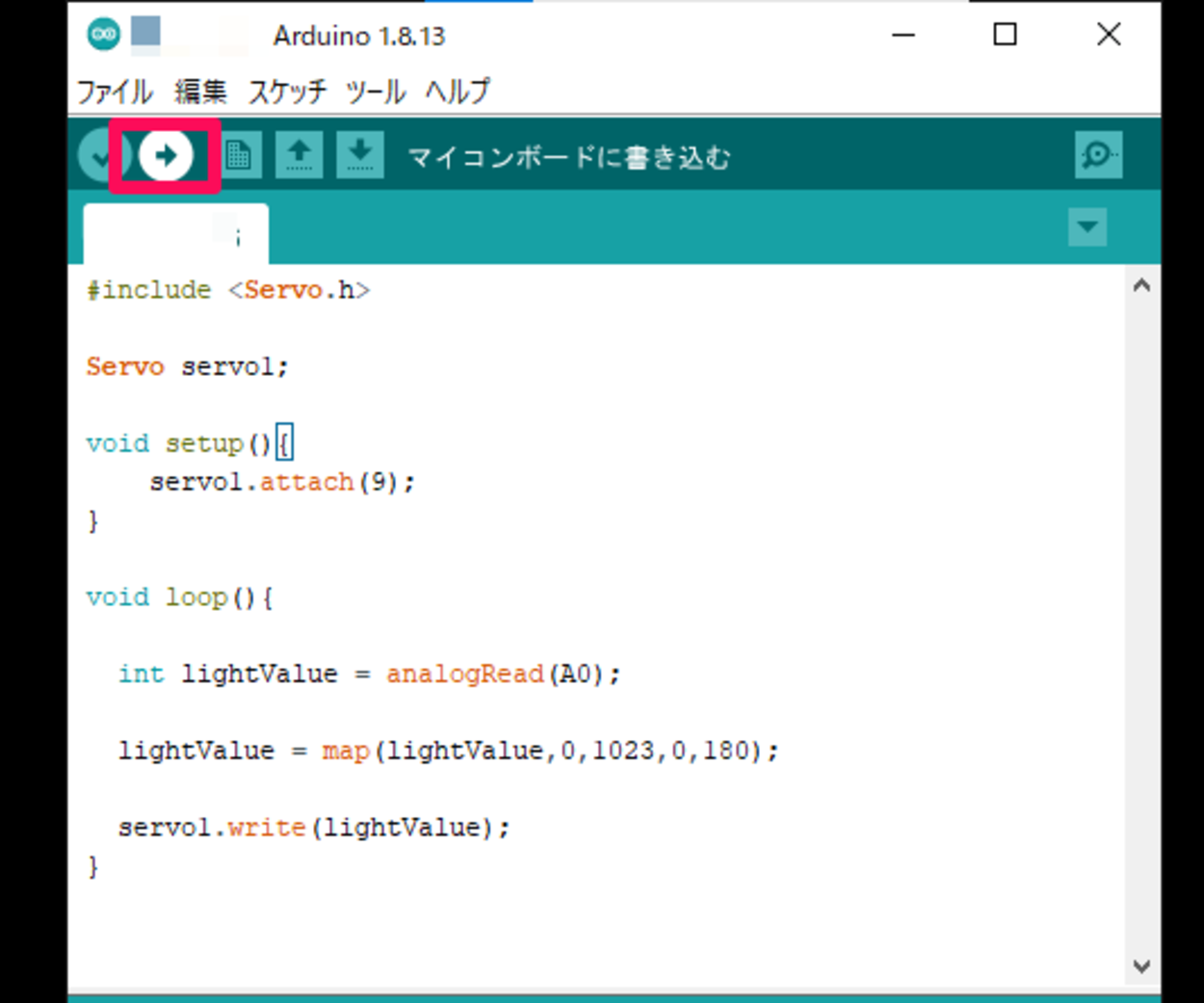
確認後、「Arduino」ウインドウ内の上部にある「マイコンボードに書き込む・書込装置を使って書き込み」ボタンをクリックします。
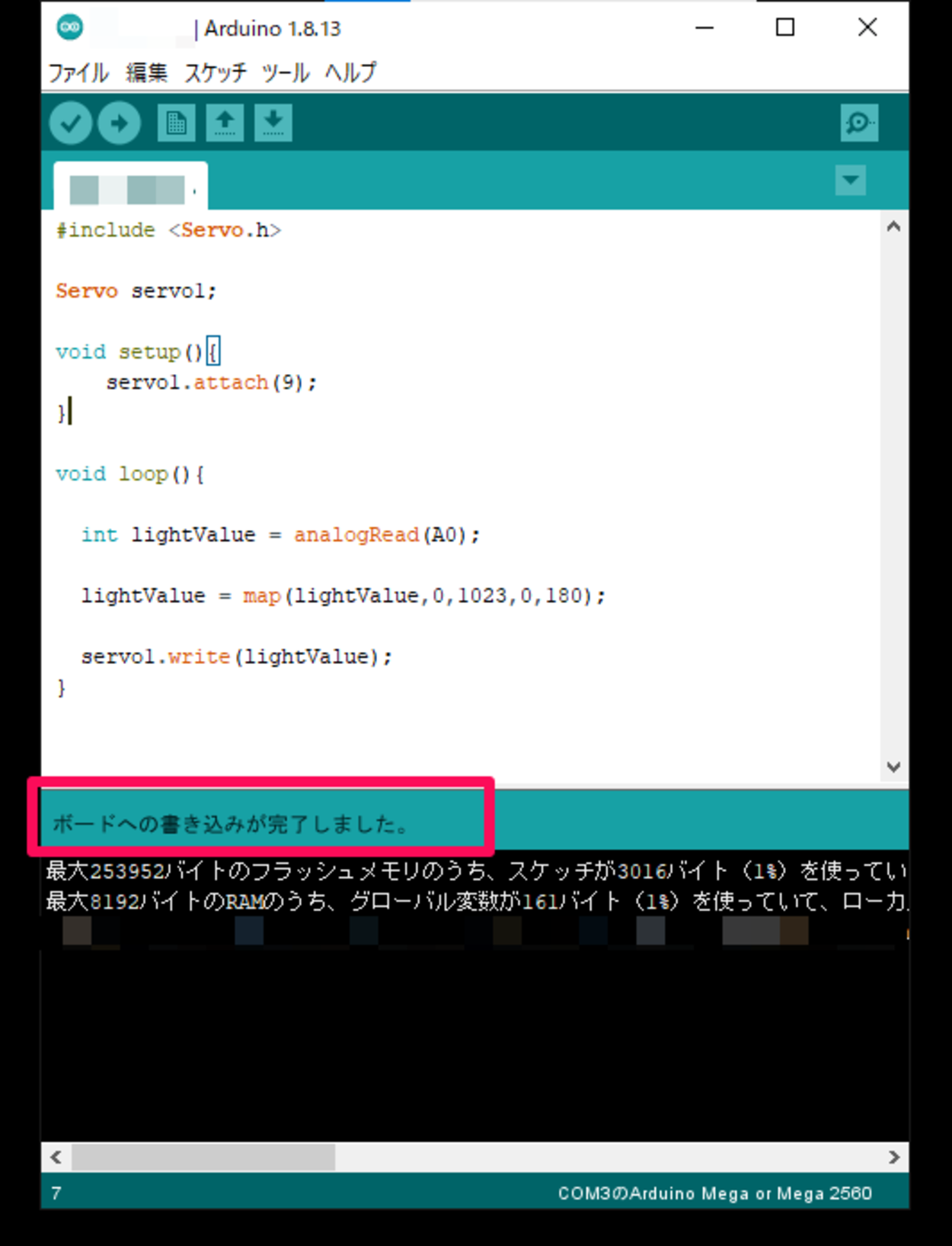
クリックすると、Elegoo MEGA2560 R3ボードにファイル(スケッチ)が書き込まれ、「Arduino」ウインドウ内の下に「ボードへの書き込みが完了しました。」と表示されます。これで書き込みは完了となります。
■フォトレジスタ(光センサー)によるサーボモーターの制御検証
書き込み後、フォトレジスタ(光センサー)によるサーボモーターの制御の検証を行いました。
検証を行いましたが、フォトレジスタ(光センサー)に手を近づけて部屋の光を遮ると、連動してサーボモーターが動くことを確認できました。
コメント