【Arduino】HuskyLens AI ビジョンセンサー/MVカメラモジュールを使用してみます。
■用意したもの
・Arduinoバージョン1.8.13がインストールされているPC(Windows10)
・Elegoo MEGA2560 R3ボード(マイコン)、1個(https://amzn.to/3jtvfjW)

今回はElegoo MEGA2560 R3ボードを使用しています。
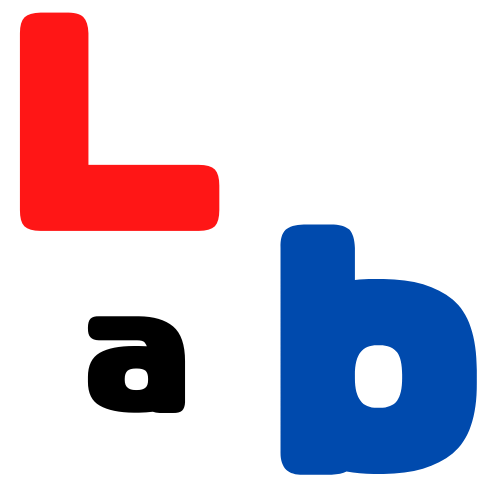
・HuskyLens AI ビジョンセンサー/MVカメラモジュール、1個(https://amzn.to/2IQpccX)
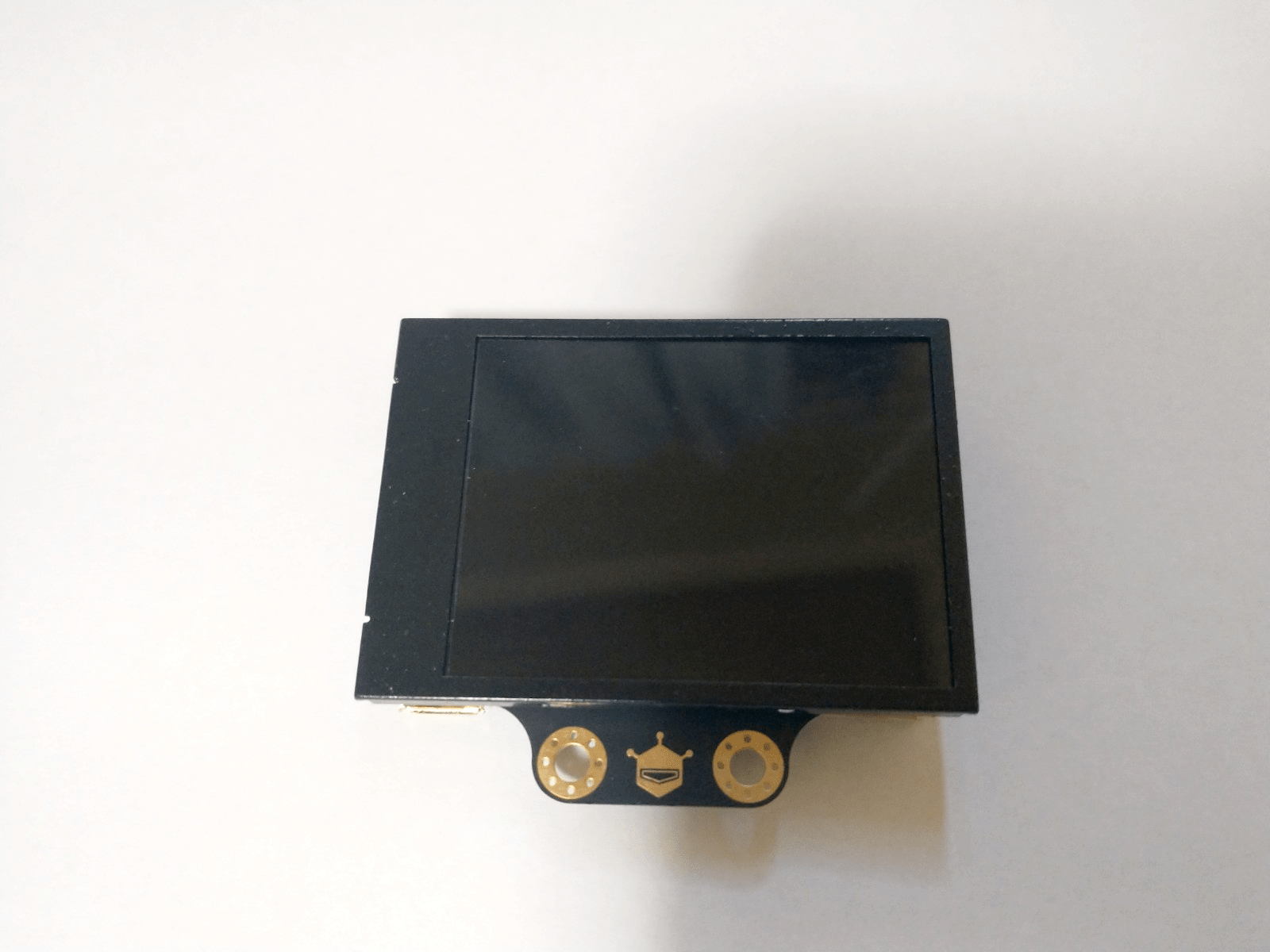
・Gravity4ピンセンサケーブル、1つ
※Gravity4ピンセンサケーブルは、HuskyLens AI ビジョンセンサー/MVカメラモジュールに付属しています。
■HuskyLens用のArduinoライブラリをダウンロードする。
まずは、HuskyLens用のArduinoライブラリをダウンロードします。ダウンロードはこちらからダウンロードできます。
クリックすると、Webサイトの指定されているファイルの保存場所に「HUSKYLENSArduino-master.zip」というファイルがダウンロードされます。
ダウンロードされたフォルダを解凍すると、「HUSKYLENS」というフォルダがあります。
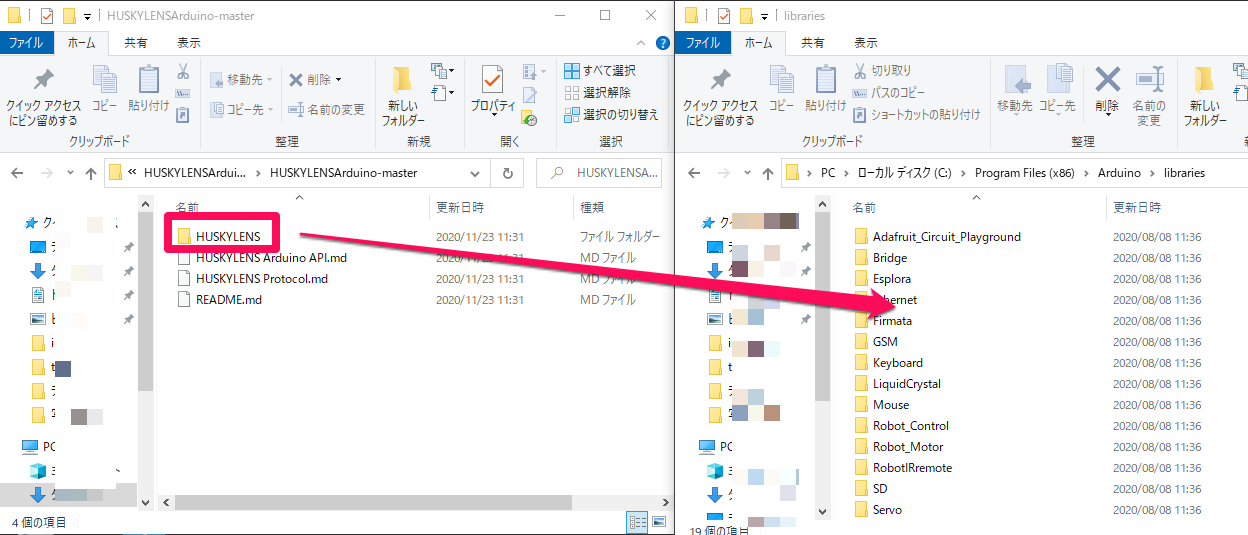
このフォルダをコピーして、「C:\Program Files (x86)\Arduino\libraries」のフォルダ内に貼り付けます。
■MEGA2560 R3ボード(マイコン)にHuskyLens AI ビジョンセンサー/MVカメラモジュールを接続する
貼り付けた後に、MEGA2560 R3ボード(マイコン)にHuskyLens AI ビジョンセンサー/MVカメラモジュールを接続します。
接続を行いたいのですが、HuskyLens AI ビジョンセンサー/MVカメラモジュールに付属していたGravity4ピンセンサケーブルがメスなので、MEGA2560 R3ボード(マイコン)には直接接続できません。
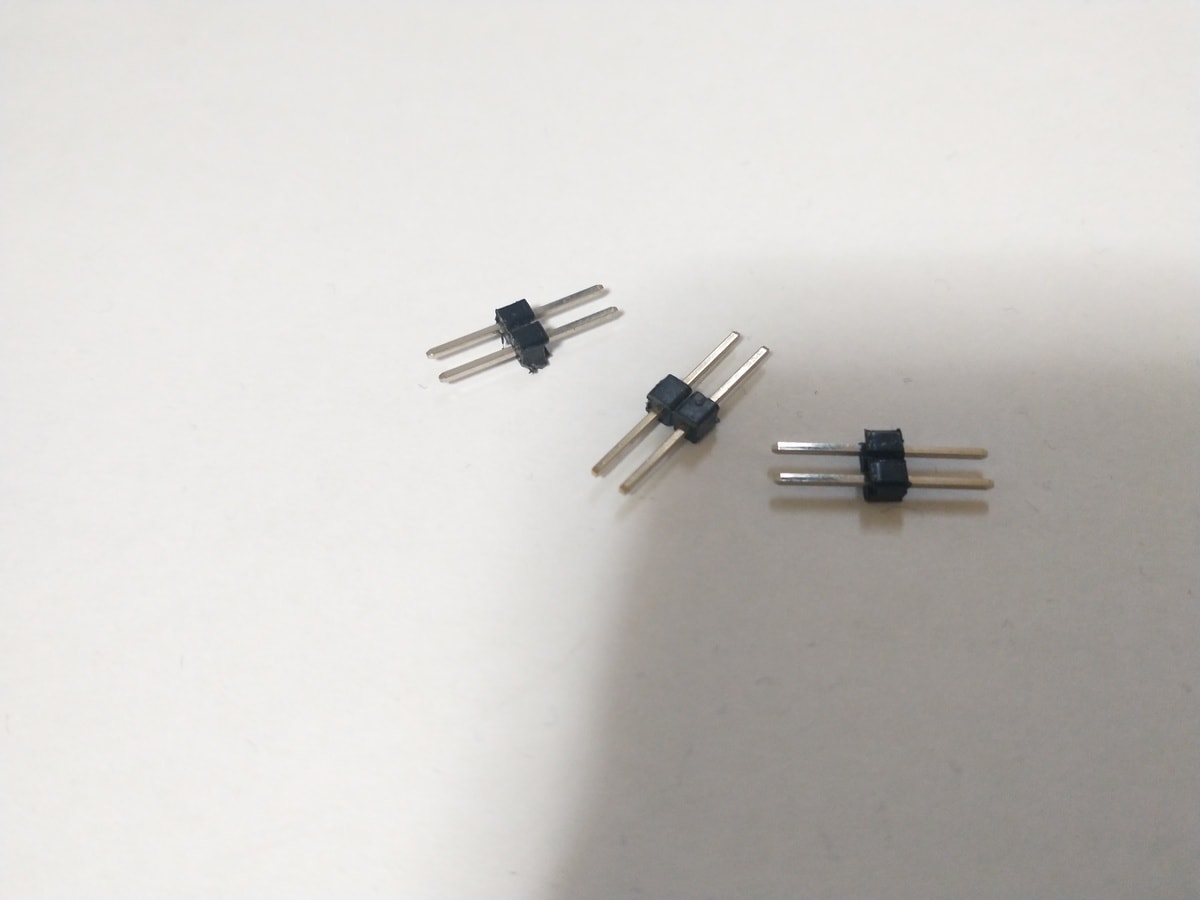
今回、接続する方法を考えたところ、両端ロングピンヘッダ2Pを使用して接続を試みます。
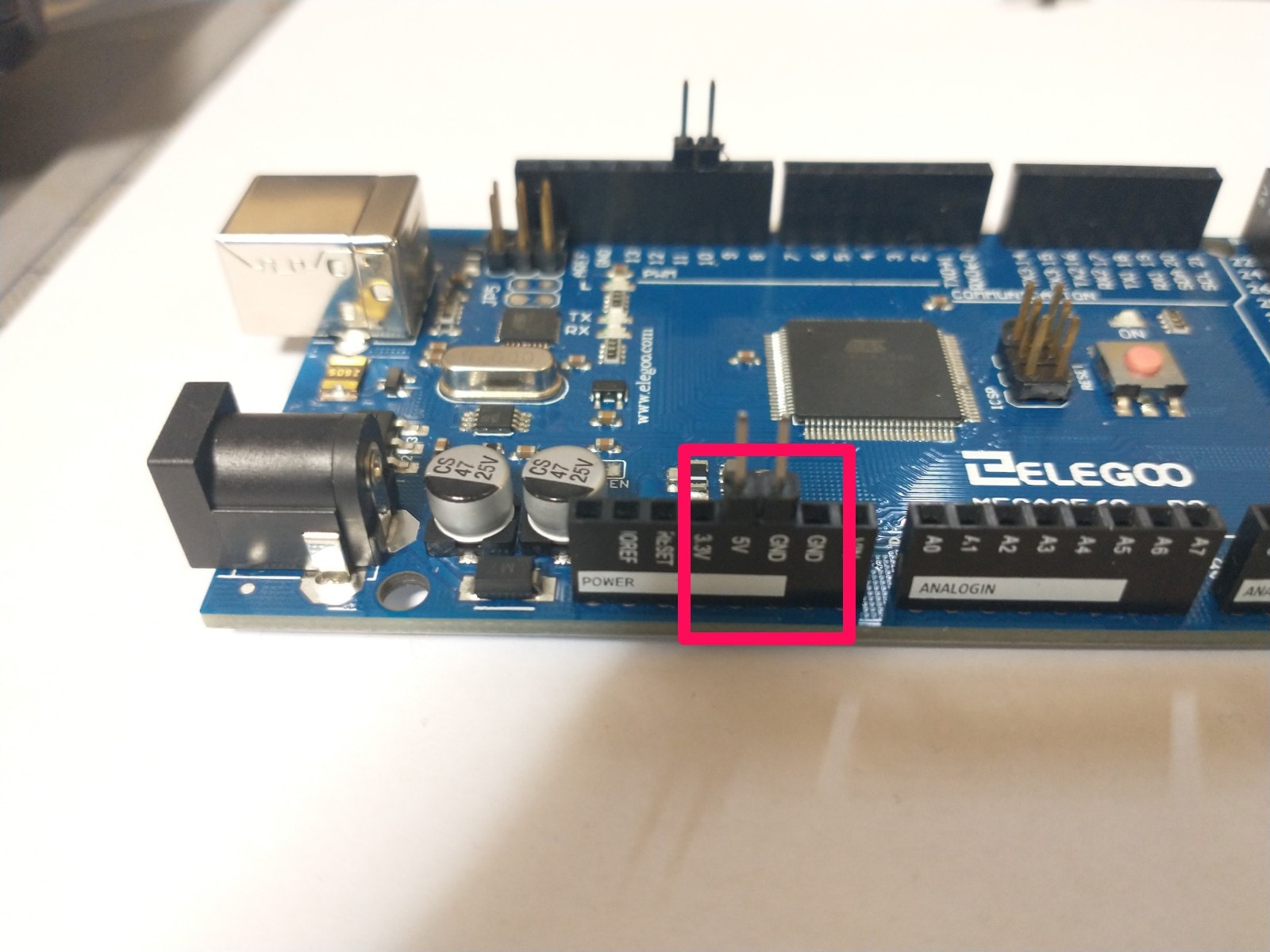

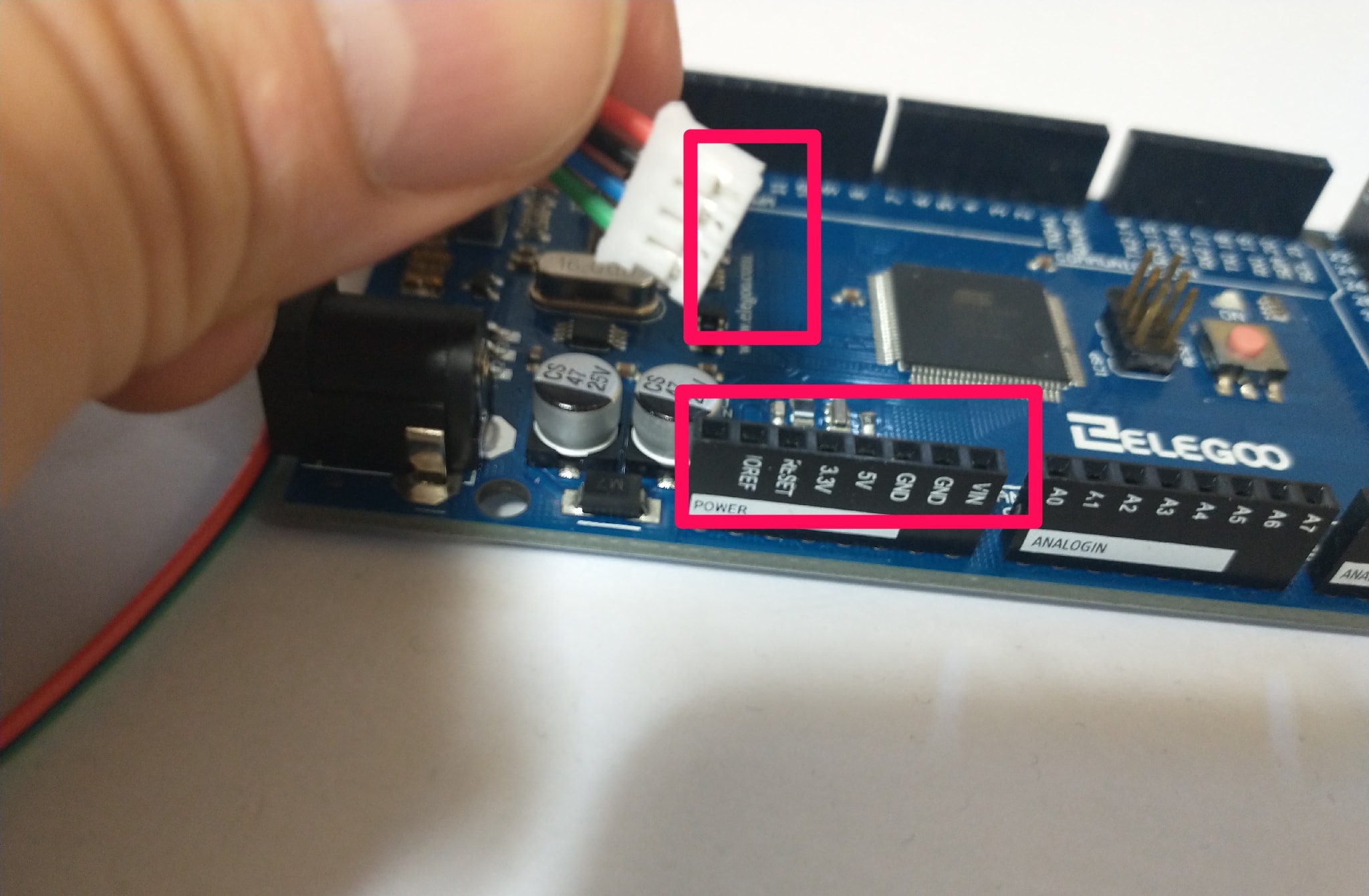
両端ロングピンヘッダ2Pを「5V」、「GND」、「11」、「10」のところに差し込みます。
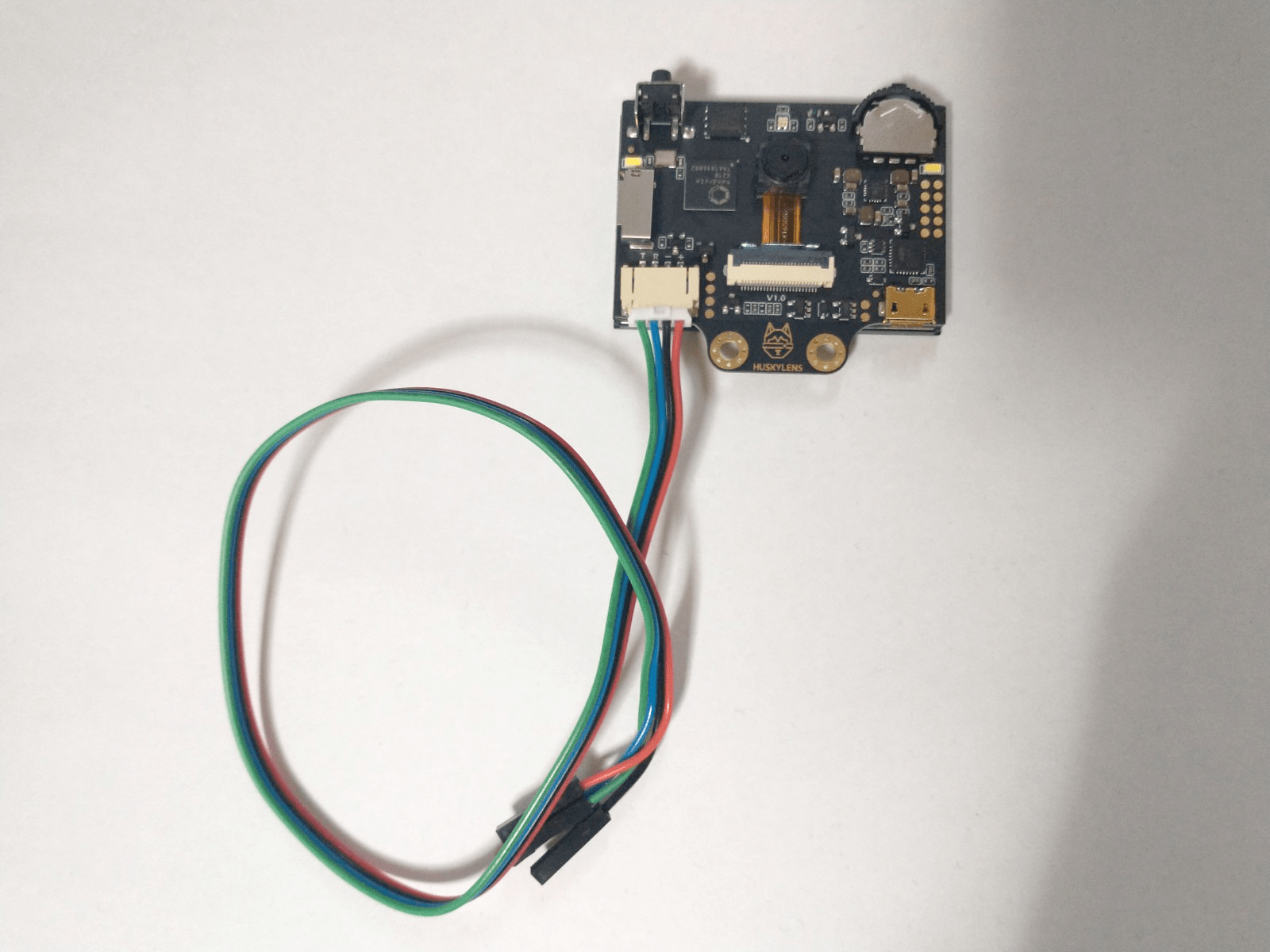
差し込んだ後に、HuskyLens AI ビジョンセンサー/MVカメラモジュール本体にGravity4ピンセンサケーブルを差し込みます。
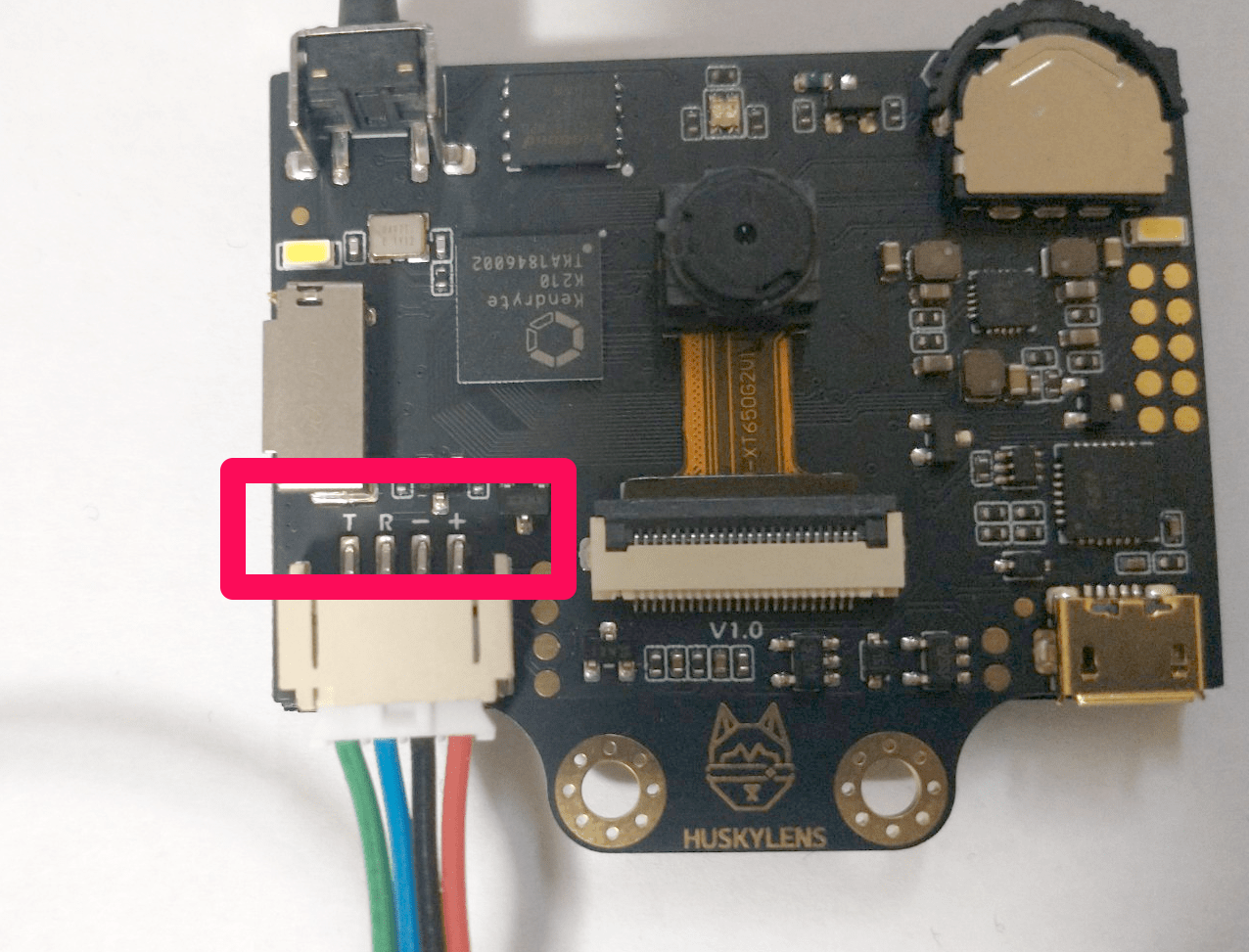
Gravity4ピンセンサケーブルを差し込むところに、「T]、「R」、「-」、「+」といった表記がありますので、これを確認しておきます。
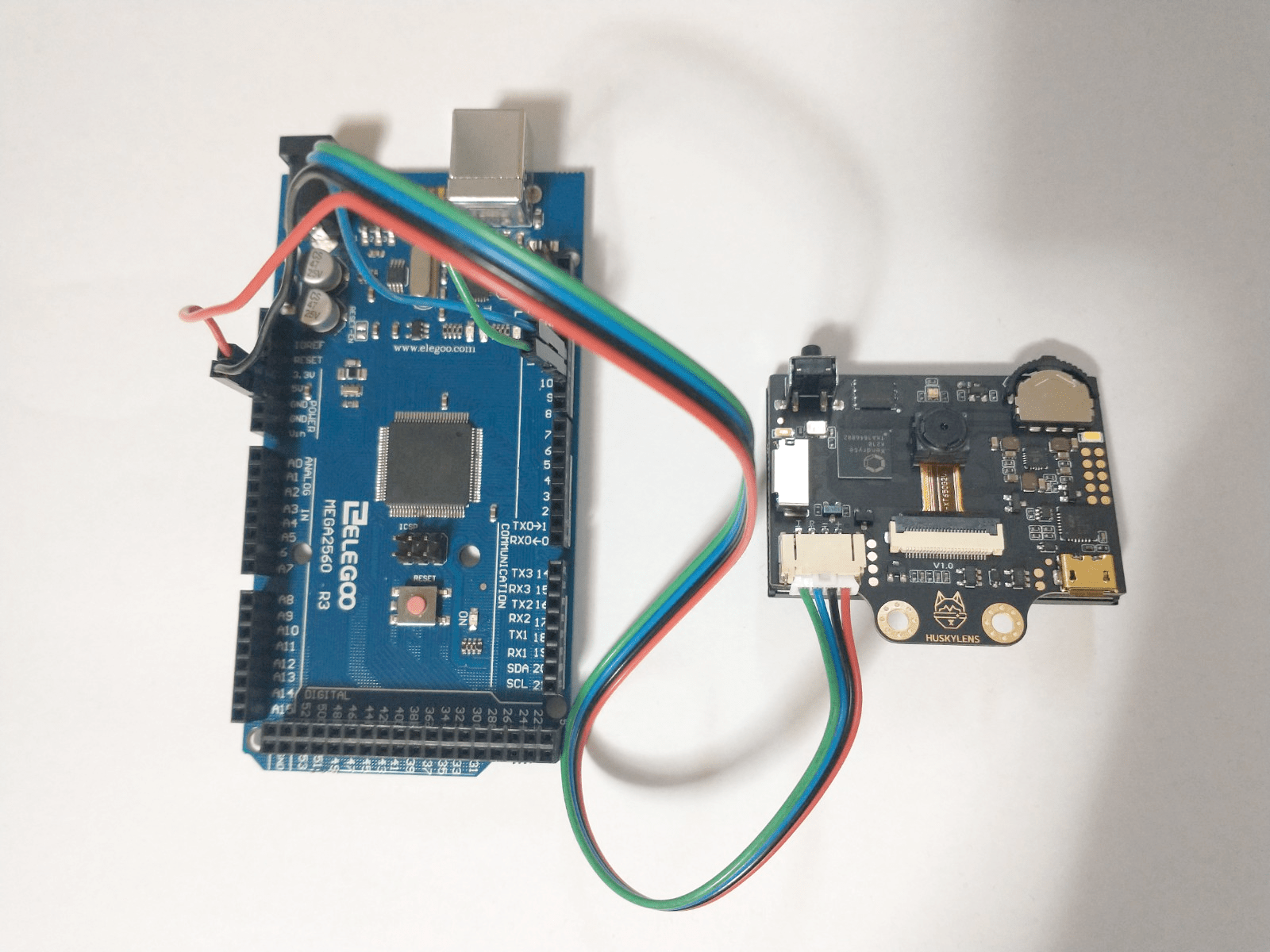



確認後、Gravity4ピンセンサケーブルをMEGA2560 R3ボード(マイコン)に差し込みます。
■MEGA2560 R3ボード(マイコン)をPC(パソコン)に接続する
差し込んだ後、MEGA2560 R3ボードをUSBケーブルを使って、PC(パソコン)に接続する。
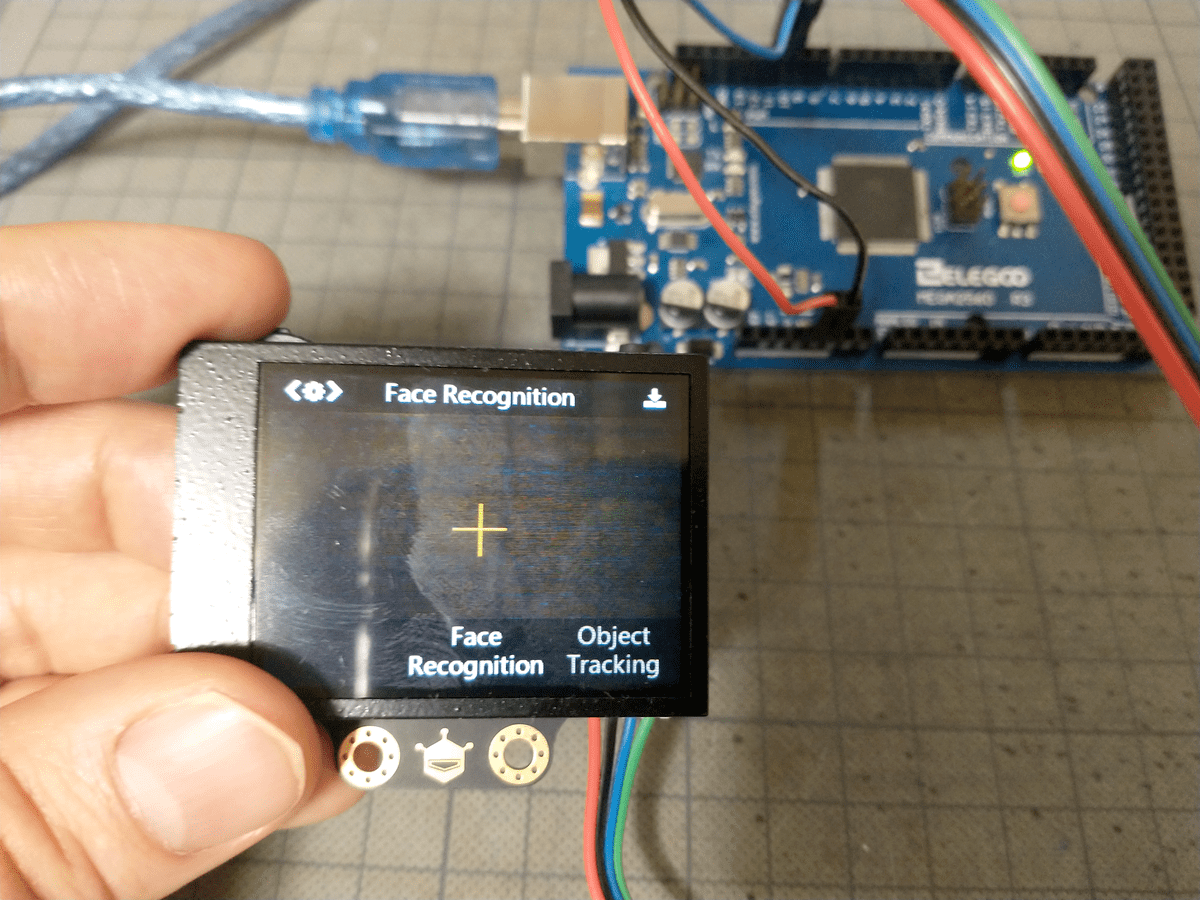
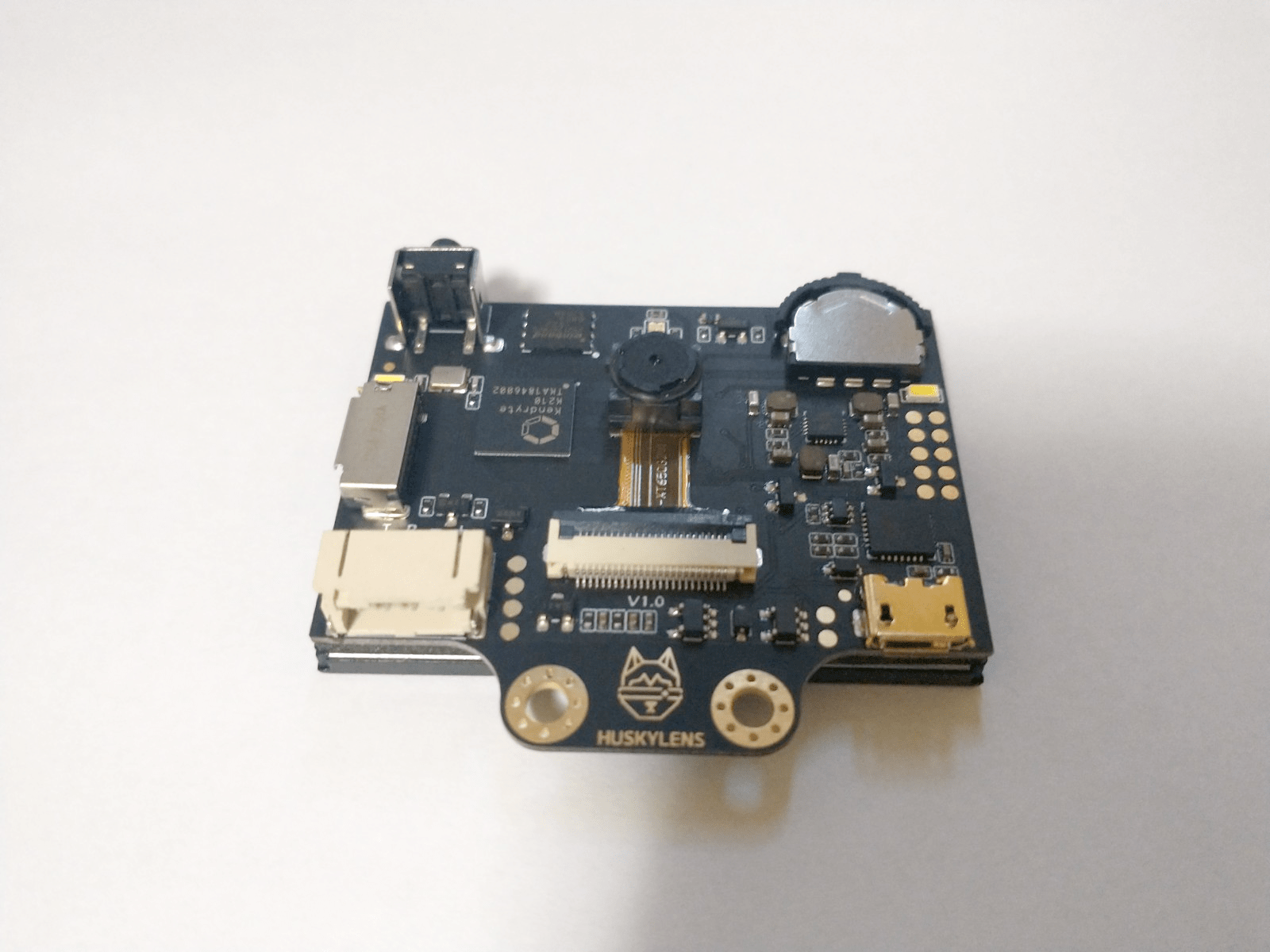
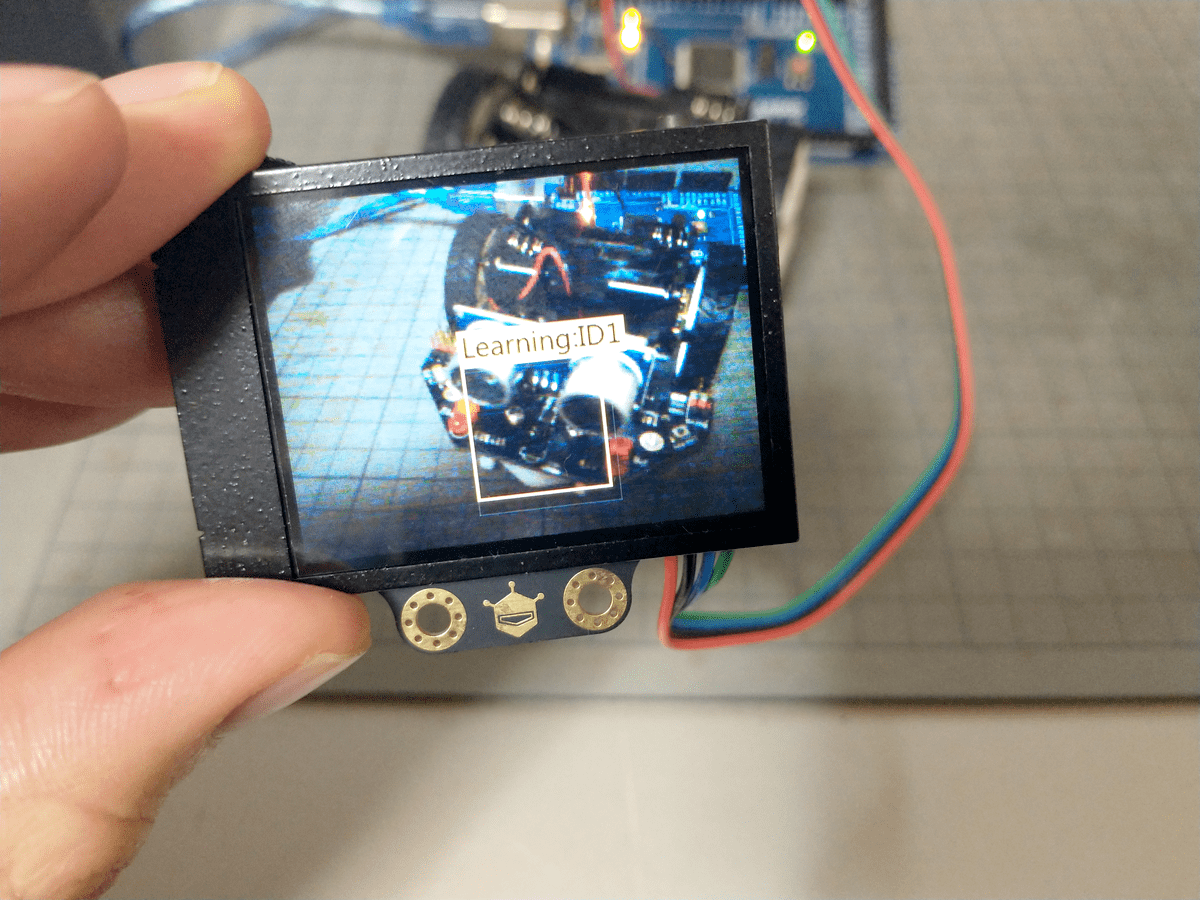
接続すると、2.0インチIPSスクリーンに、カメラで撮影した映像が表示されます。
■ArduinoIDEを起動する
接続後、ArduinoIDEを起動します。
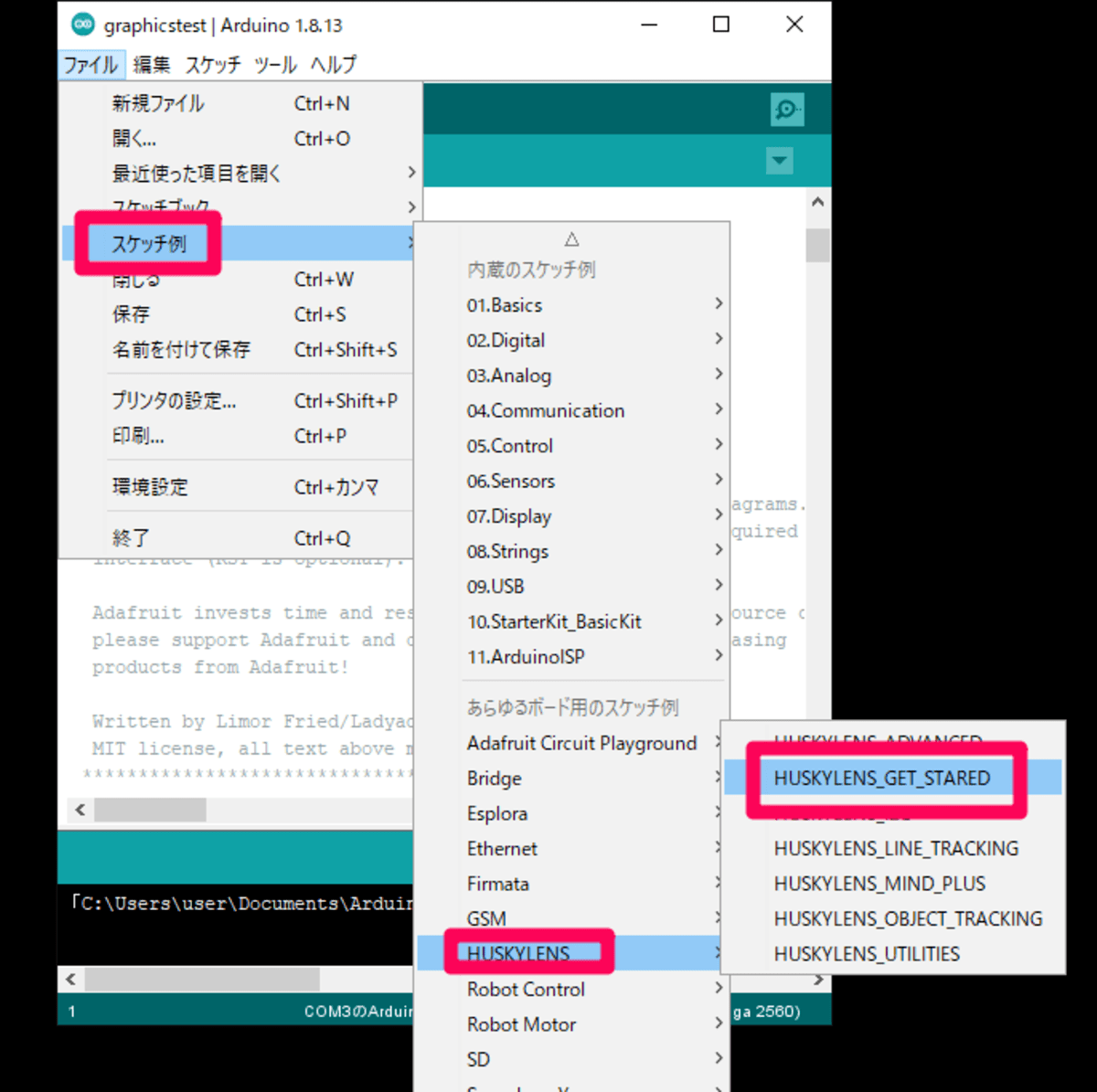
起動後、「ファイル」から「スケッチ例」をクリックします。クリック後、「HUSKYLENS」をクリックし、「HUSKYLENS_GET_STARED」をクリックします。
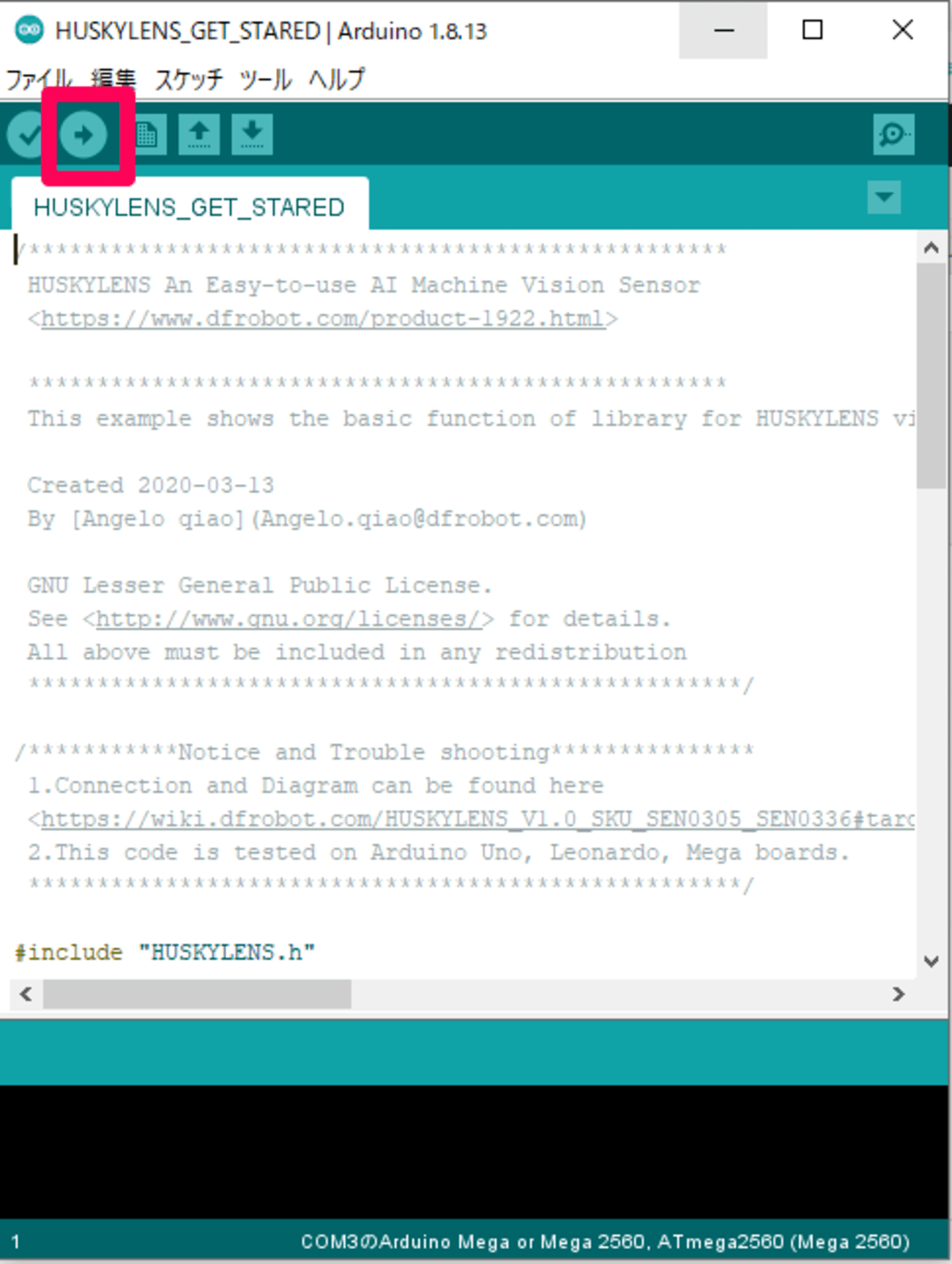
クリックすると、「HUSKYLENS_GET_STARED」のスケッチが表示されますので、ArduinoIDE上部にある「マイコンボードに書き込む・書込装置を使って書き込み」ボタンをクリックします。クリックする際は、接続したPC(パソコン)でMEGA2560 R3ボードが認識されているかを確認し、クリックします。
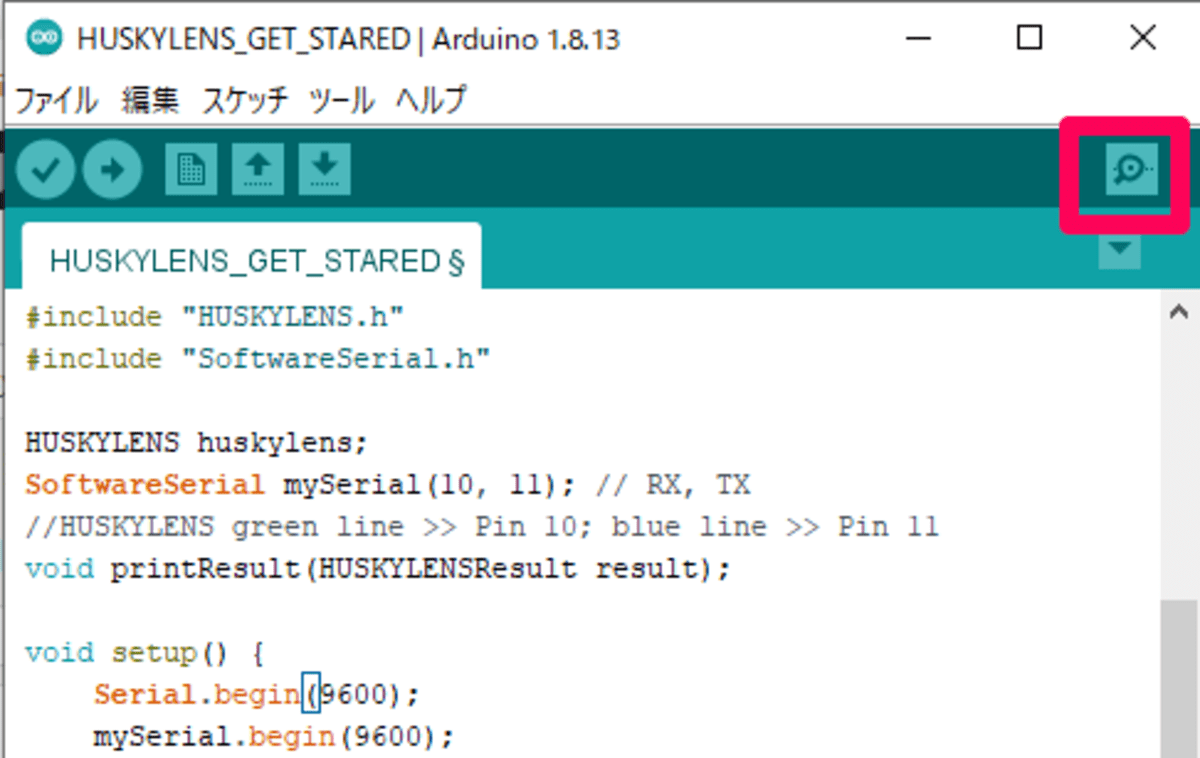
クリック後、「ボードへの書き込みが完了しました。」と表示され、書き込みが成功します。成功した後に、シリアルモニタのボタンをクリックします。
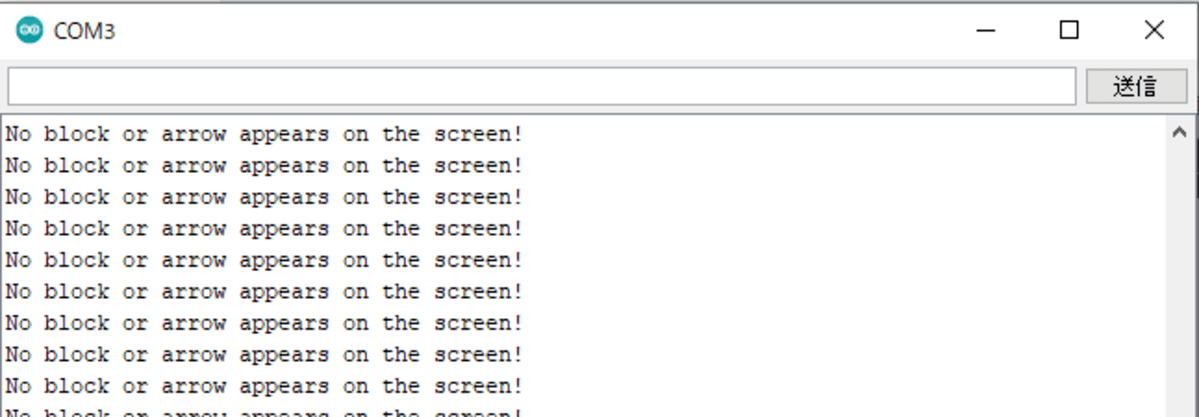
クリックすると、シリアルモニタが表示されます。「No block or arrow appears on the screen!(画面にブロックや矢印は表示されません!)」と表示されていますので、HuskyLens AI ビジョンセンサー/MVカメラモジュール本体のスクリーンに表示されている機能を使用し、物体を認識させます。
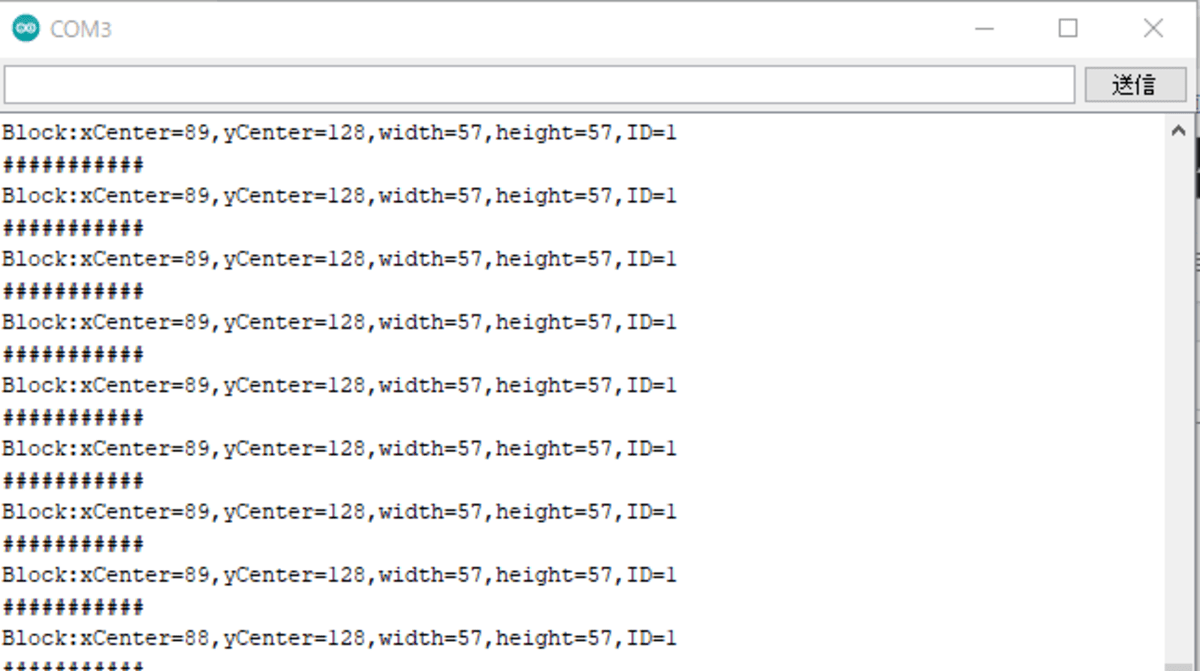
認識させると、シリアルモニタで物体を認識され情報が出力されます。この時、シリアルモニタが文字化けしてしまう場合は、
■変更前
Serial.begin(115200);
■変更後
Serial.begin(9600);
上記のように、「HUSKYLENS_GET_STARED」のスケッチを変更し、書き込みを行うと、文字化けが発生せずに表示されます。
コメント