Arduino Elegoo MEGA2560 R3ボードで3軸加速度センサー/ジャイロ・モジュールを使用する
■用意したもの
・Arduinoバージョン1.8.13がインストールされているPC(Windows10)
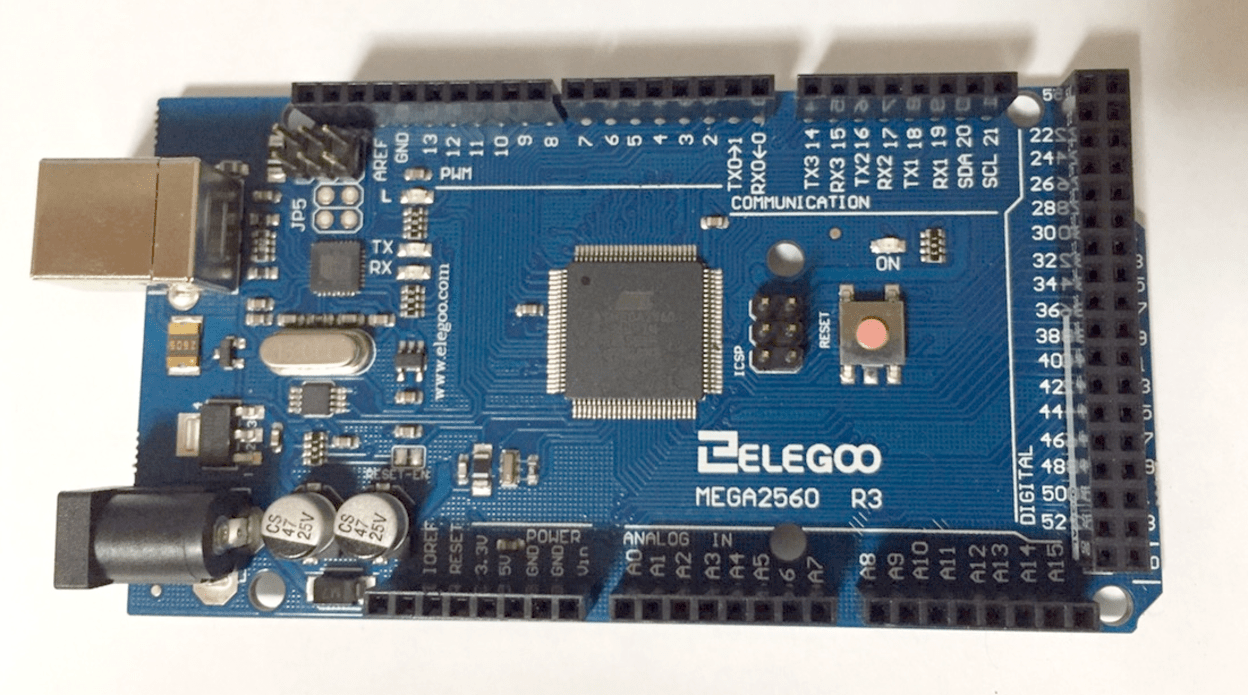
・Elegoo MEGA2560 R3ボード、1個(https://amzn.to/33zBcGB)
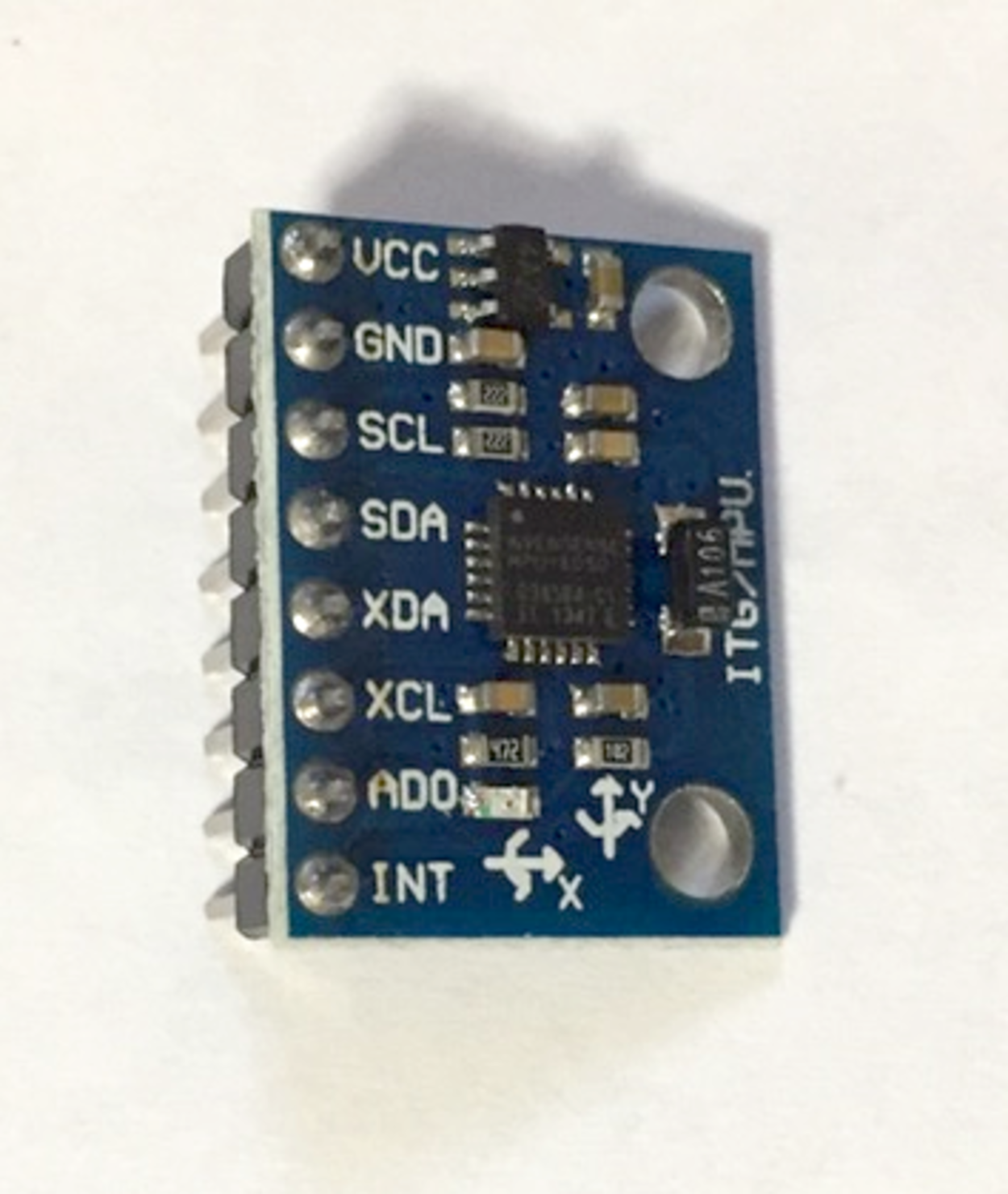
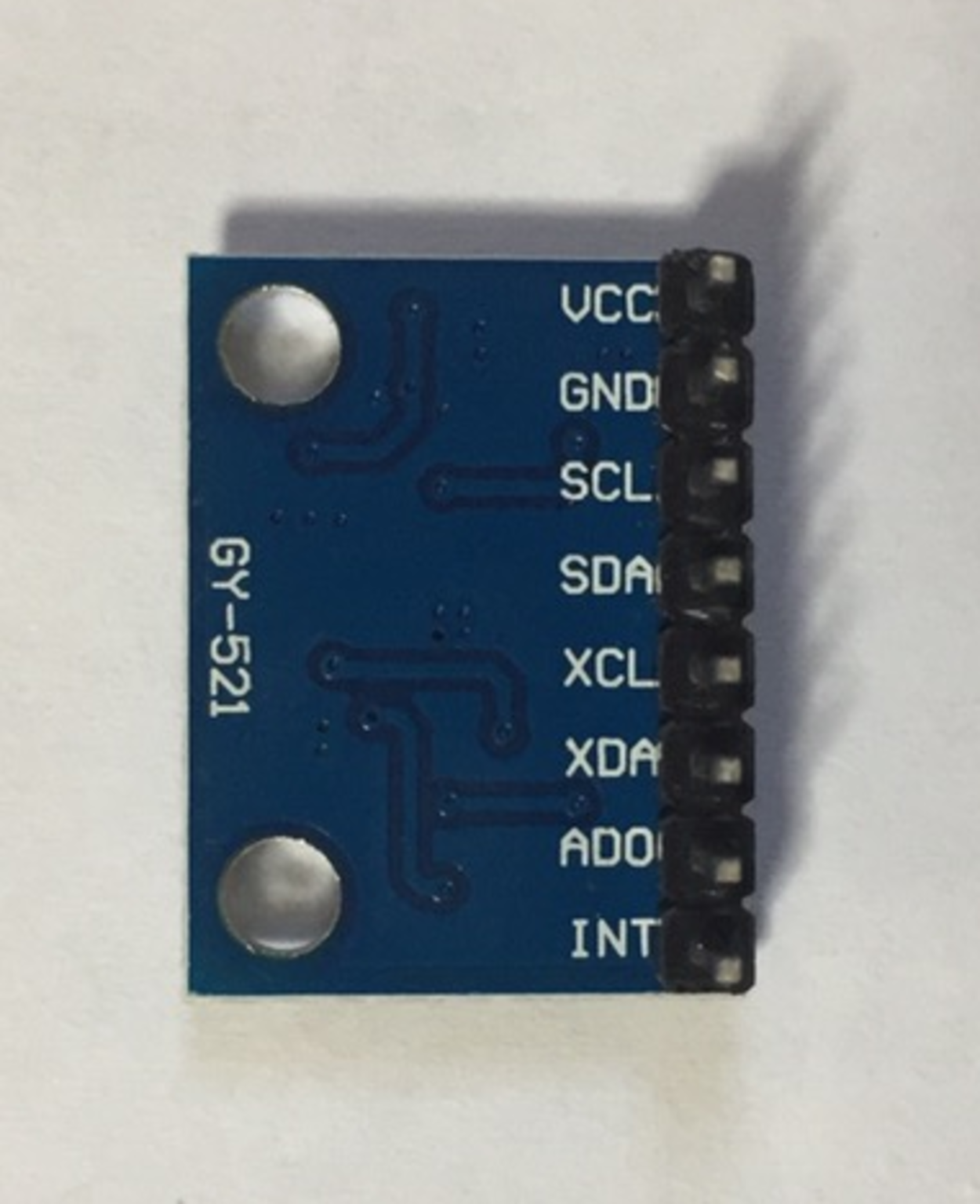
・GY-521モジュール、またはInvenSense GY-521 センサー、1個(https://amzn.to/37urkiu)
・メスからオスのデュポンワイヤーリボンケーブル(Female to Male DuPont wires)、4つ(https://amzn.to/39FXaLU)

それぞれ(ELEGOO Arduino用のMega2560スタータキット最終版)に付属しているものです。
■3軸加速度センサー/ジャイロ・モジュールへの理解
今回用意したGY-521モジュール、またはInvenSense GY-521 センサーは、MEMS 加速度計と MEMS ジャイロを1つのチップに内蔵しているものです。なお、GY-521は加速度計とジャイロの両方を組み合わせているのが特徴で高い価格で販売されてはいない。
GY-521のような3軸のジャイロと3方向の加速度計によって、3次元の角速度と加速度が検出できるIMU(慣性計測装置)センサーは、あらゆる種類の電子機器で使用されている。主にスマートフォン、ウェアラブル、ゲームコントローラーなどです。
IMU(慣性計測装置)センサーは、主に2つ以上の部品で構成されている。 加速度計、ジャイロスコープ、磁力計、 高度計が優先的にそのリストに入る。
なお、GY-521は 6軸IMU(慣性計測装置)センサーであり、出力として「6つ」の値が取得できます。その6つの値は、加速度計からの3つの値と、ジャイロスコープからの3つの値になります。
また、GY-521はMicro Electro Mechanical Systems(微小電気機械システム)(メムス)と呼ばれる機械・電子などの多様な機能を集積化したデバイス技術に基づいたセンターとなっています。
そのため、加速度計とジャイロスコープは両方とも1つのチップに内蔵。このチップはI2C
(Inter Integrated Circuit)プロトコル通信に使用されます。
■3軸加速度センサー/ジャイロ・モジュールとメスからオスのデュポンワイヤーを接続する
それでは、Elegoo MEGA2560 R3ボードでGY-521モジュール(3軸加速度センサー/ジャイロ・モジュール)を制御し使用してみますので、まずはGY-521モジュール(3軸加速度センサー/ジャイロ・モジュール)とメスからオスのデュポンワイヤーを接続します。
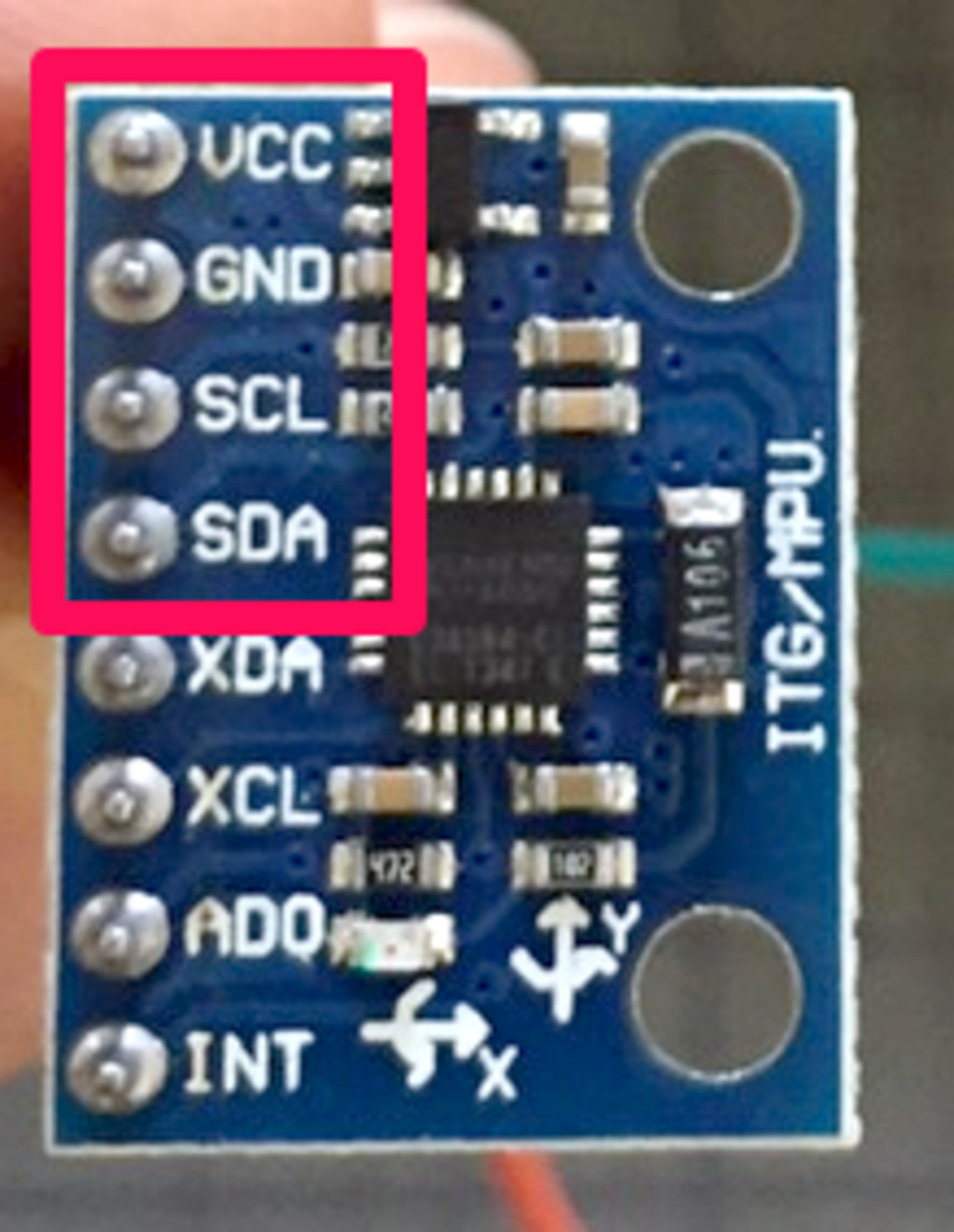
デュポンワイヤーを接続しますが、GY-521モジュール(3軸加速度センサー/ジャイロ・モジュール)本体に記載されている「VCC」、「GND」、「SCL」、「SDA」の4つのピンに接続します。
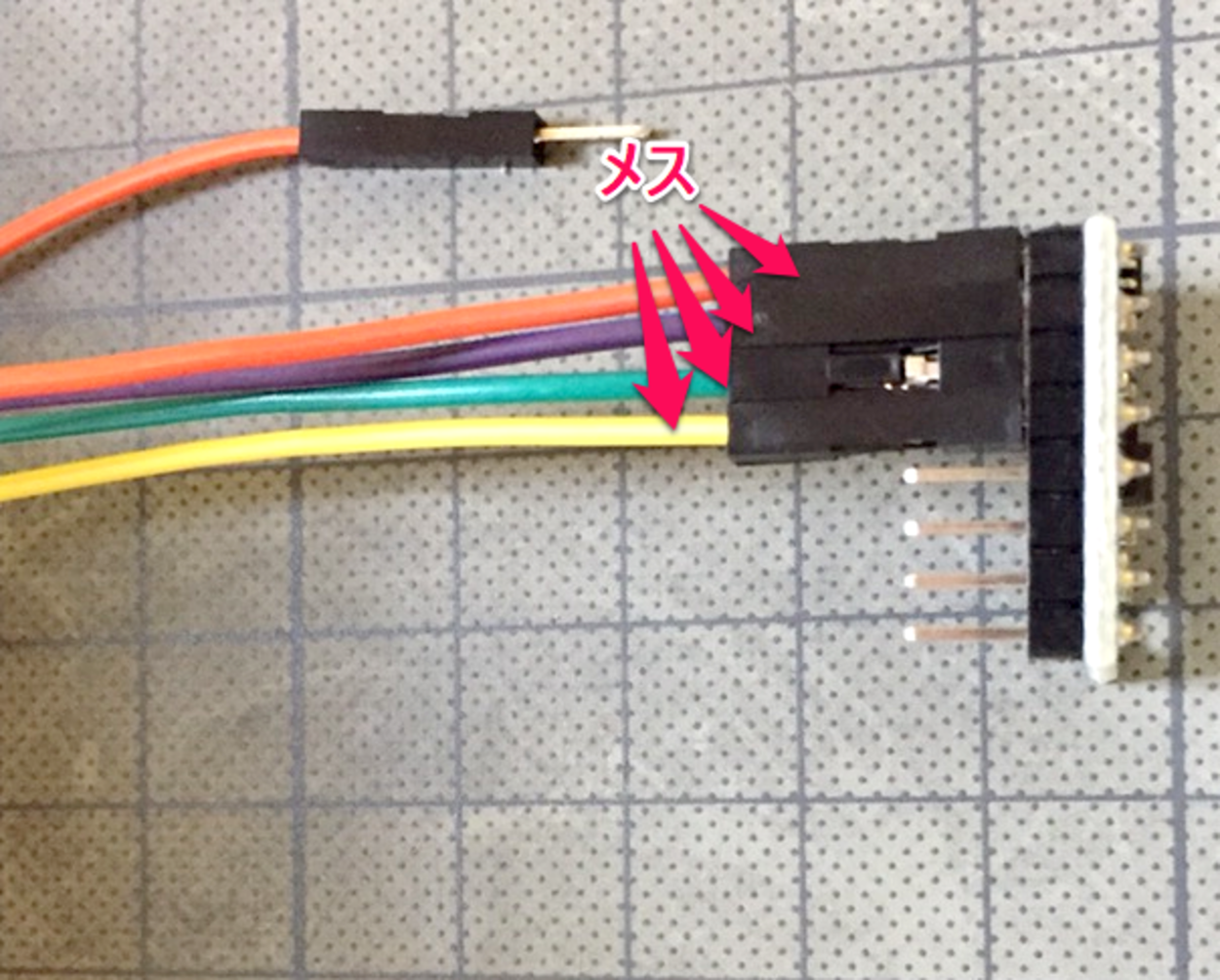
※デュポンワイヤーのオス、メスに注意する。
接続する際は、デュポンワイヤーの「メス」の方を、GY-521モジュール(3軸加速度センサー/ジャイロ・モジュール)のピンに差し込みます。
■Elegoo MEGA2560 R3ボードとデュポンワイヤーの「オス」を接続する
GY-521モジュール(3軸加速度センサー/ジャイロ・モジュール)のピンに差し込んだ後は、MEGA2560 R3ボードとデュポンワイヤーの「オス」を接続します。
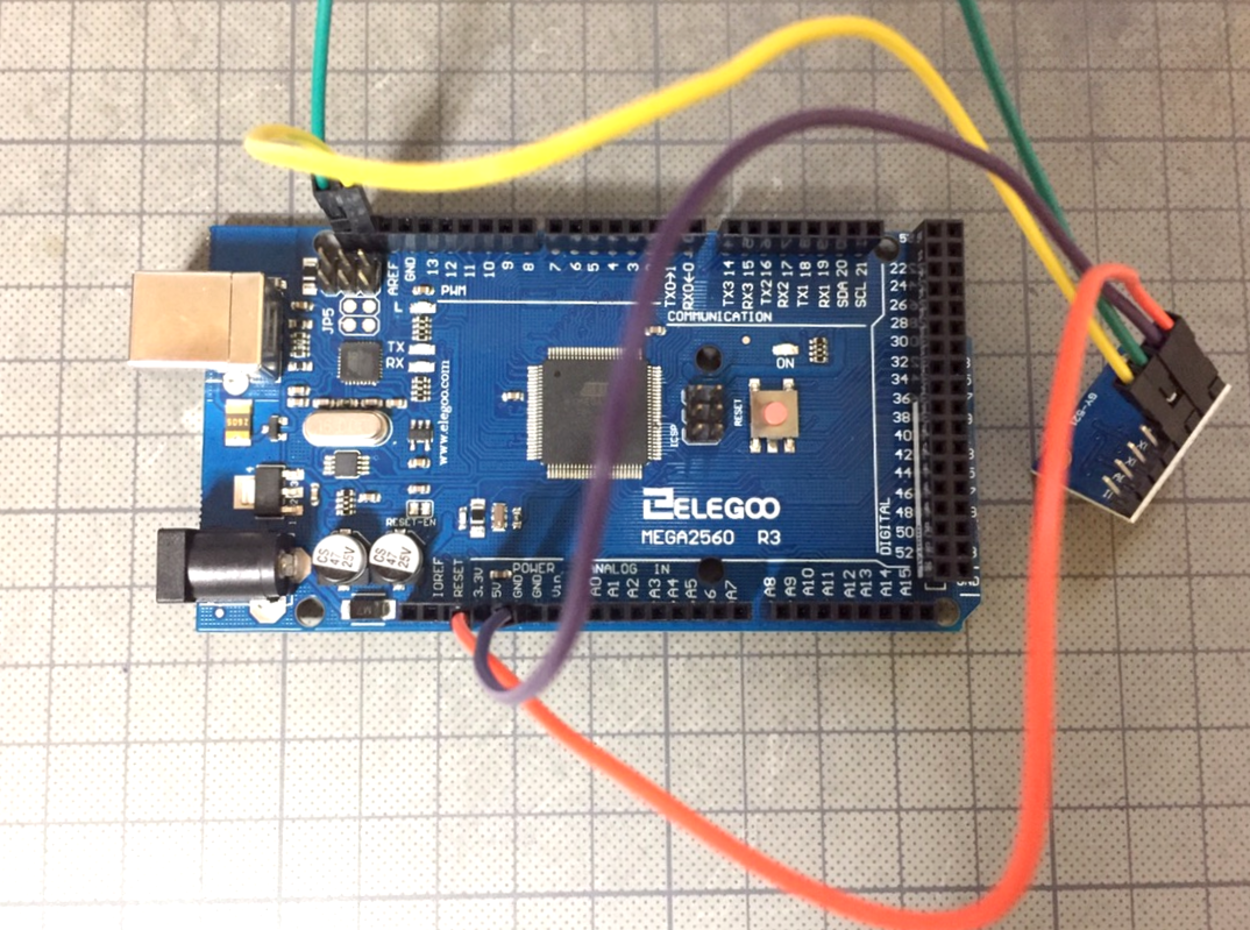
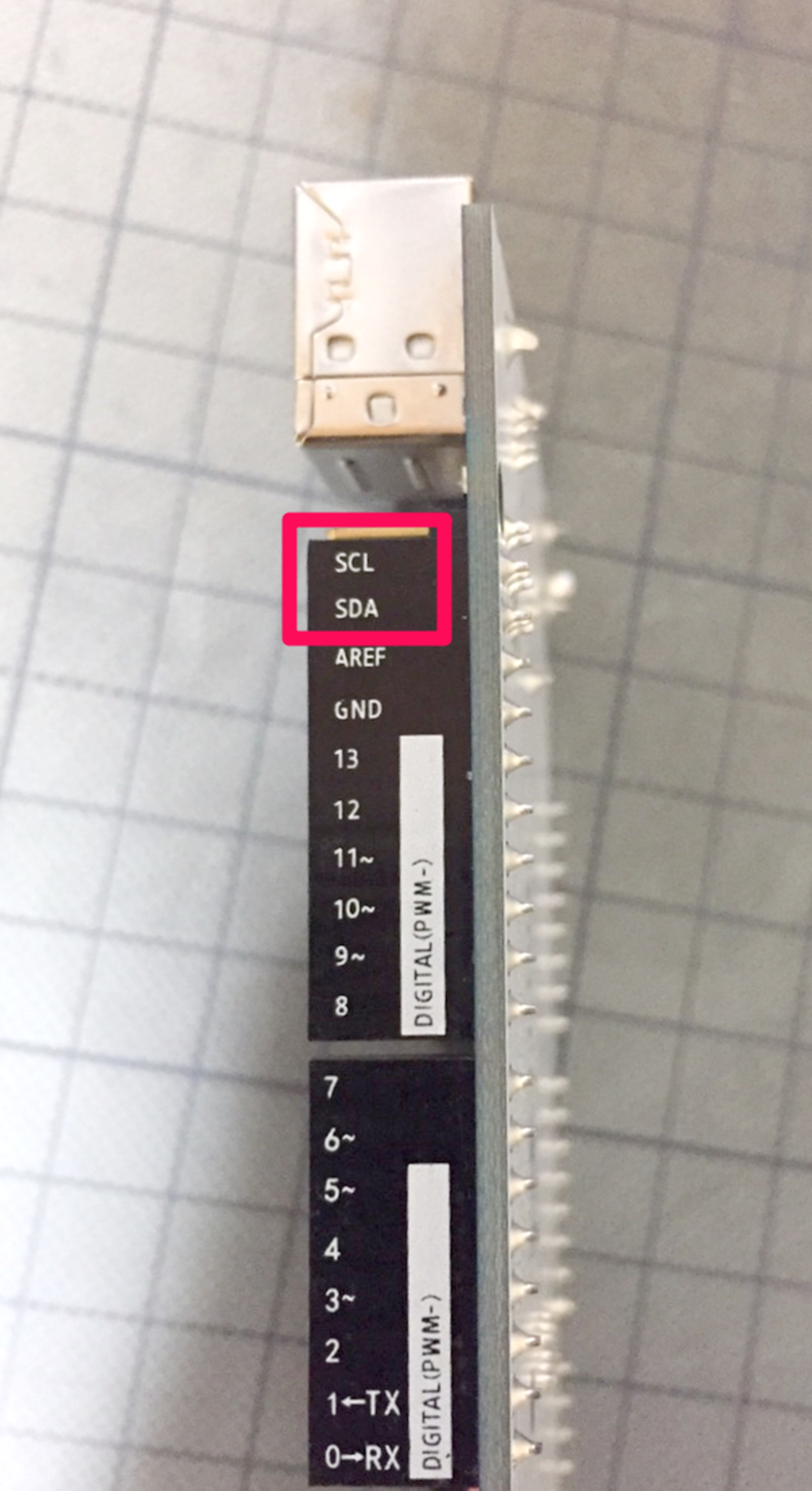
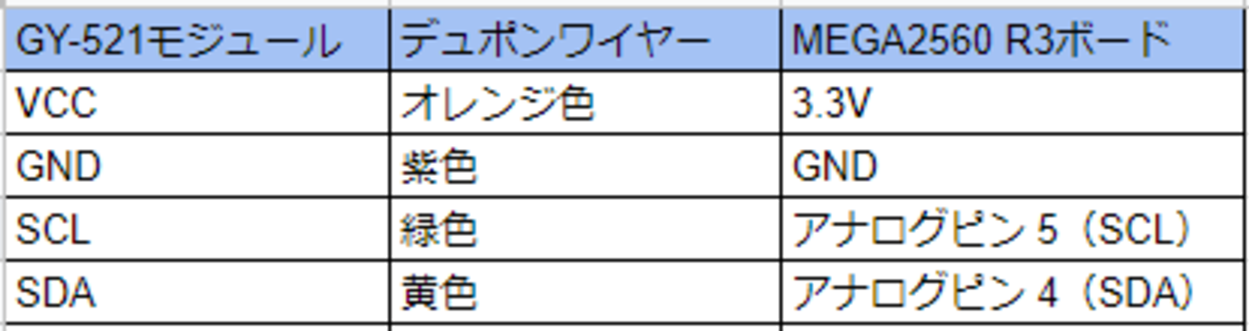
配線は上記のようになります。アナログピンは、MEGA2560 R3ボードのピンを差し込むところに記載があります。
■Elegoo MEGA2560 R3ボードをPC(パソコン)に接続する
接続後、Elegoo MEGA2560 R3ボードをUSBケーブルを使って、PC(パソコン)に接続する。
■コードをアップロードし、マイコンボードに書き込む
接続後、ELEGOO Arduino用のMega2560スタータキット最終版に付属したCD-ROMをパソコンで読み取ります。
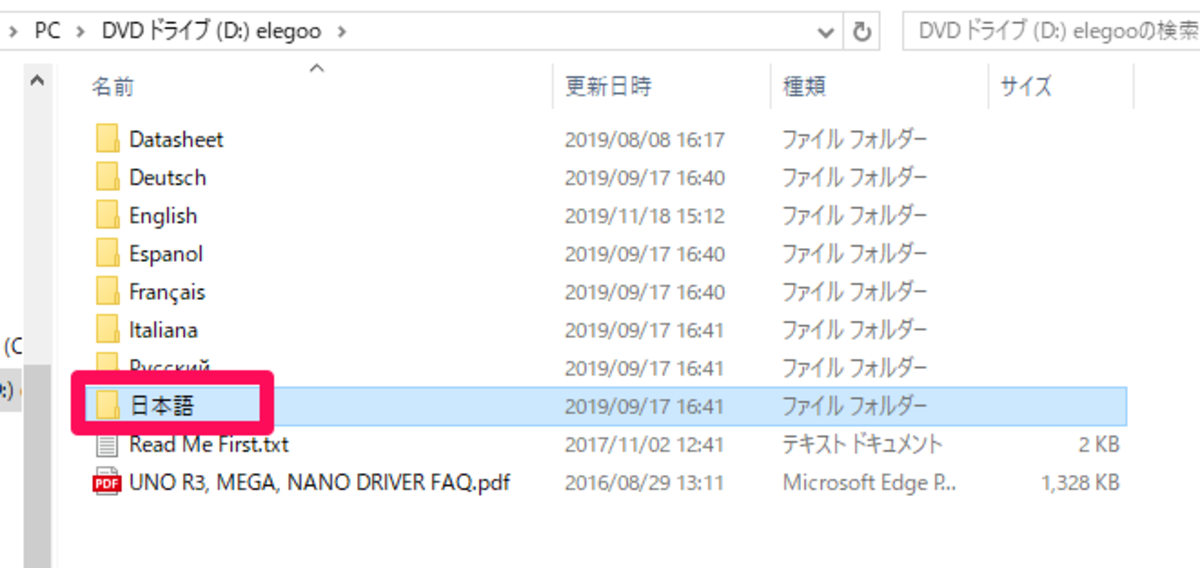
CD-ROMから「日本語」をクリックする。

「code」をクリックする。
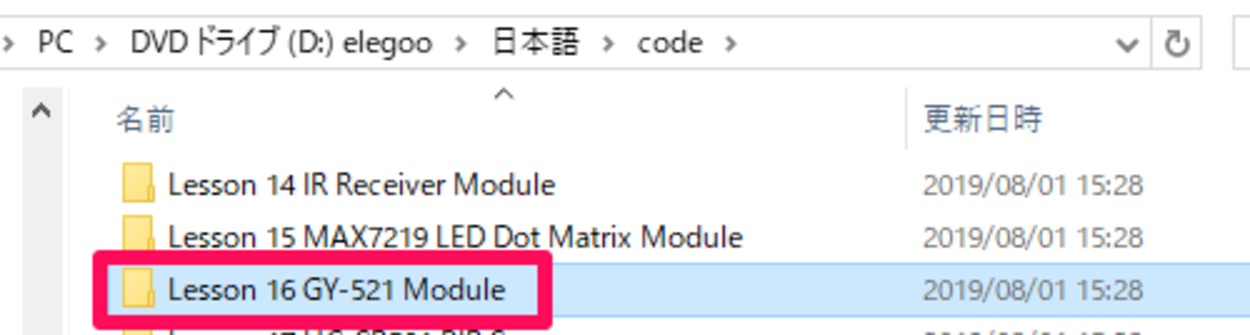
「Lesson 16 GY-521 Module」をクリックする。
「MPU-6050」をクリックする。

「MPU-6050.ino」をクリックする。
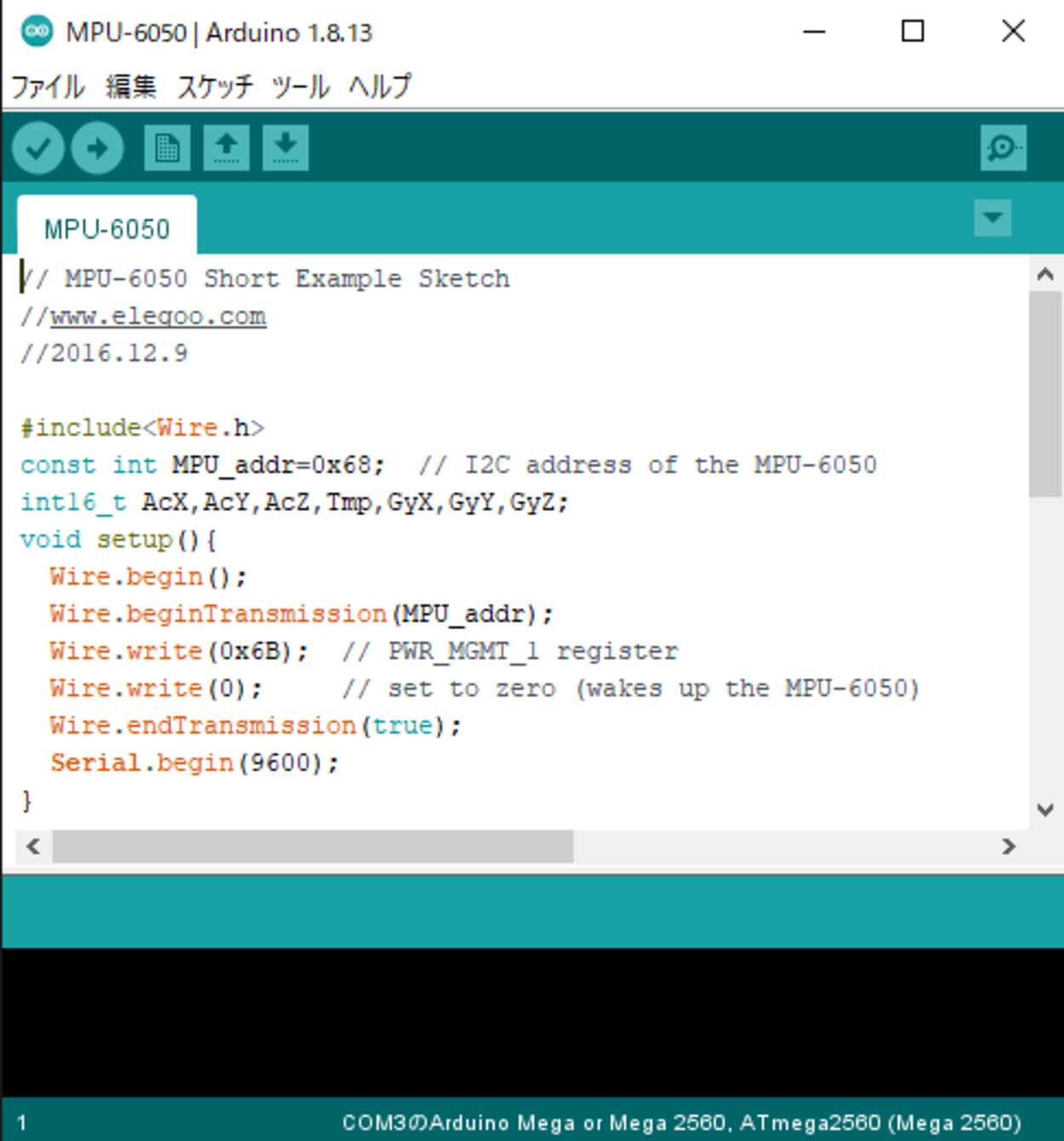
クリックすると、「Arduino」が起動し、ウインドウ内に「MPU-6050」のコードが表示されます。
このコードをMEGA2560 R3ボードに書き込んでみたいと思いますが、このままコードを書き込んでしまうとエラーになってしまうので、ライブラリを追加する必要があります。
ライブラリを追加するには、CD-ROMの「Lesson 16 GY-521 Module」の中にある「MPU6050.zip」というファイルを、コピーし、Windows10のローカル上に保存します。
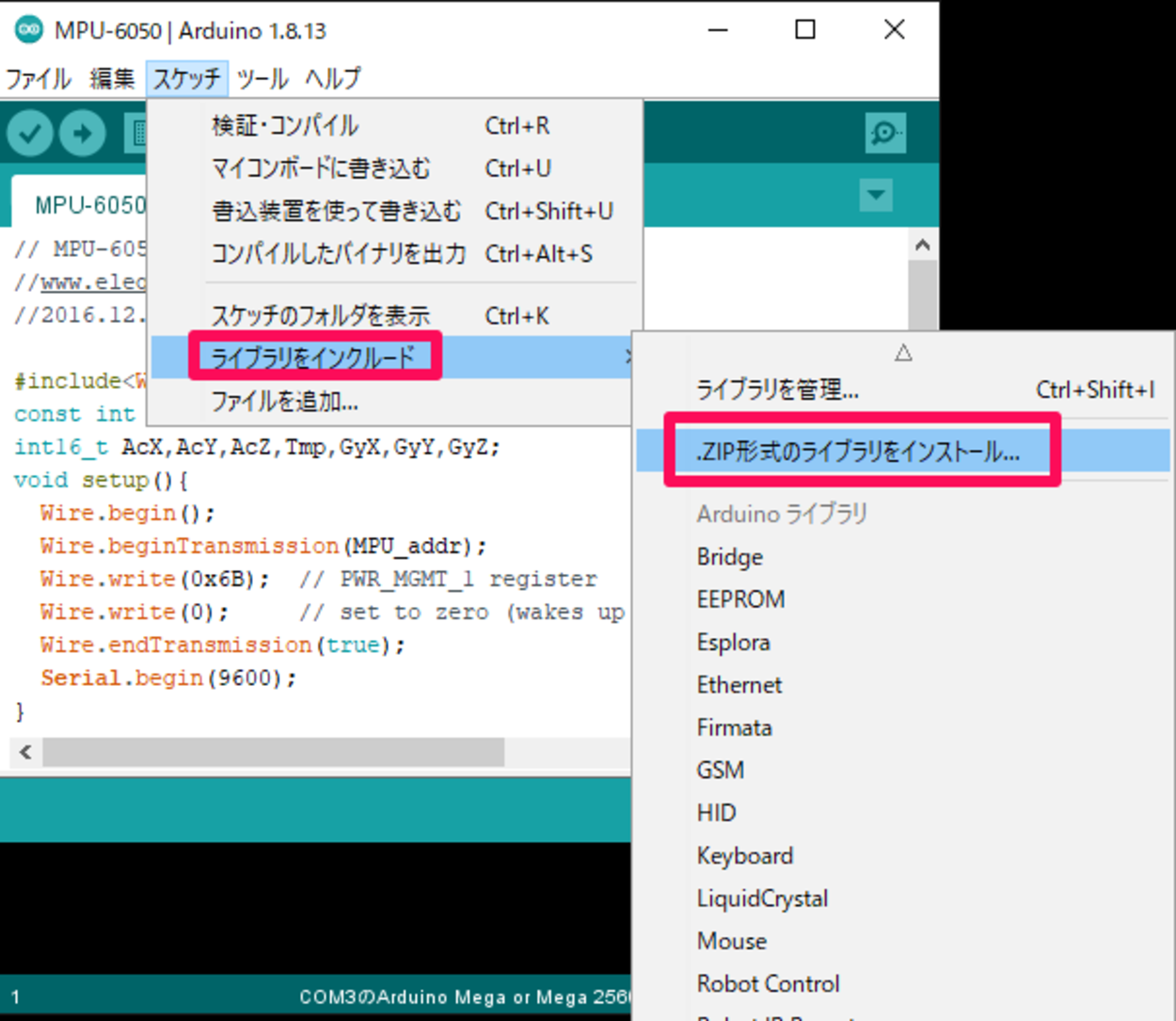
保存後、「Arduino」のウインドウ上部にある「スケッチ」をクリックします。プルダウンメニューが表示されますので「ライブラリをインクルード」をクリックします。さらにメニューが表示されますので、「.ZIP形式のライブラリをインストール」をクリックします。
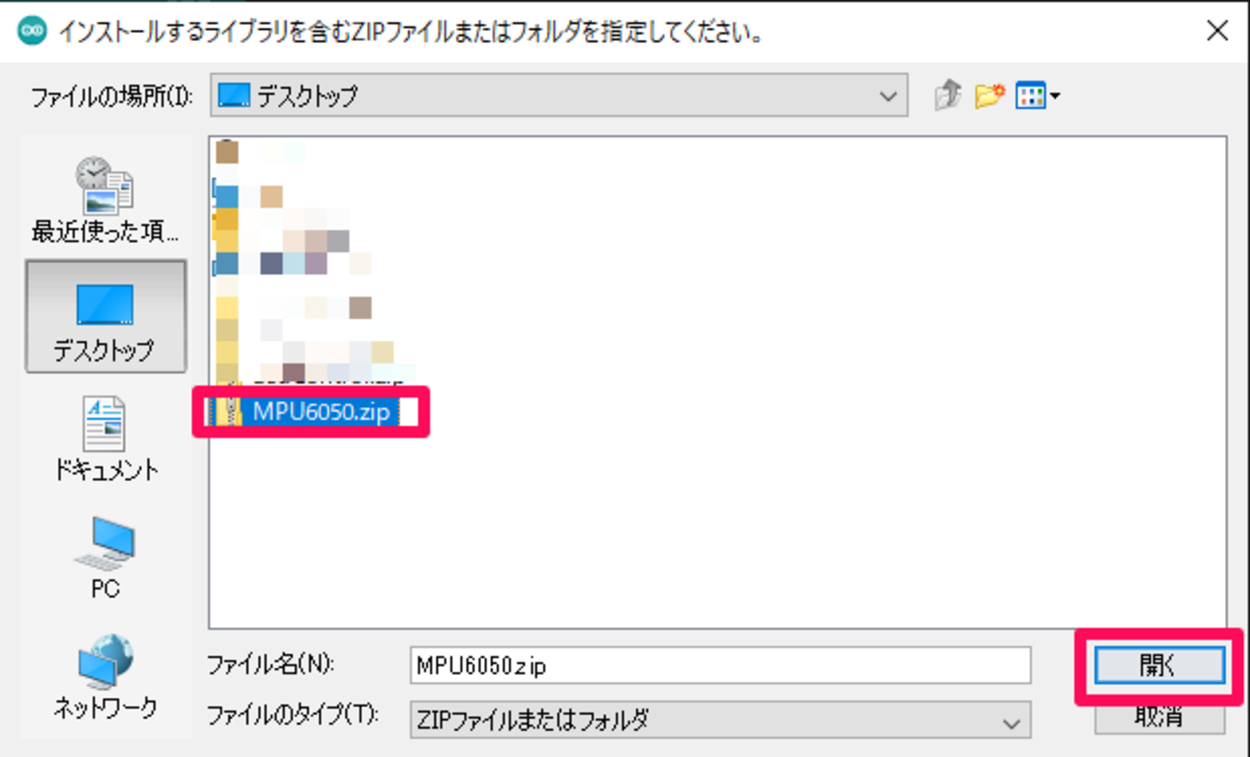
クリックすると「インストールするライブラリを含むZIPファイルまたはフォルダを指定してください。」というウインドウが表示されますので、「MPU6050.zip」を選択し、「開く」ボタンをクリックします。
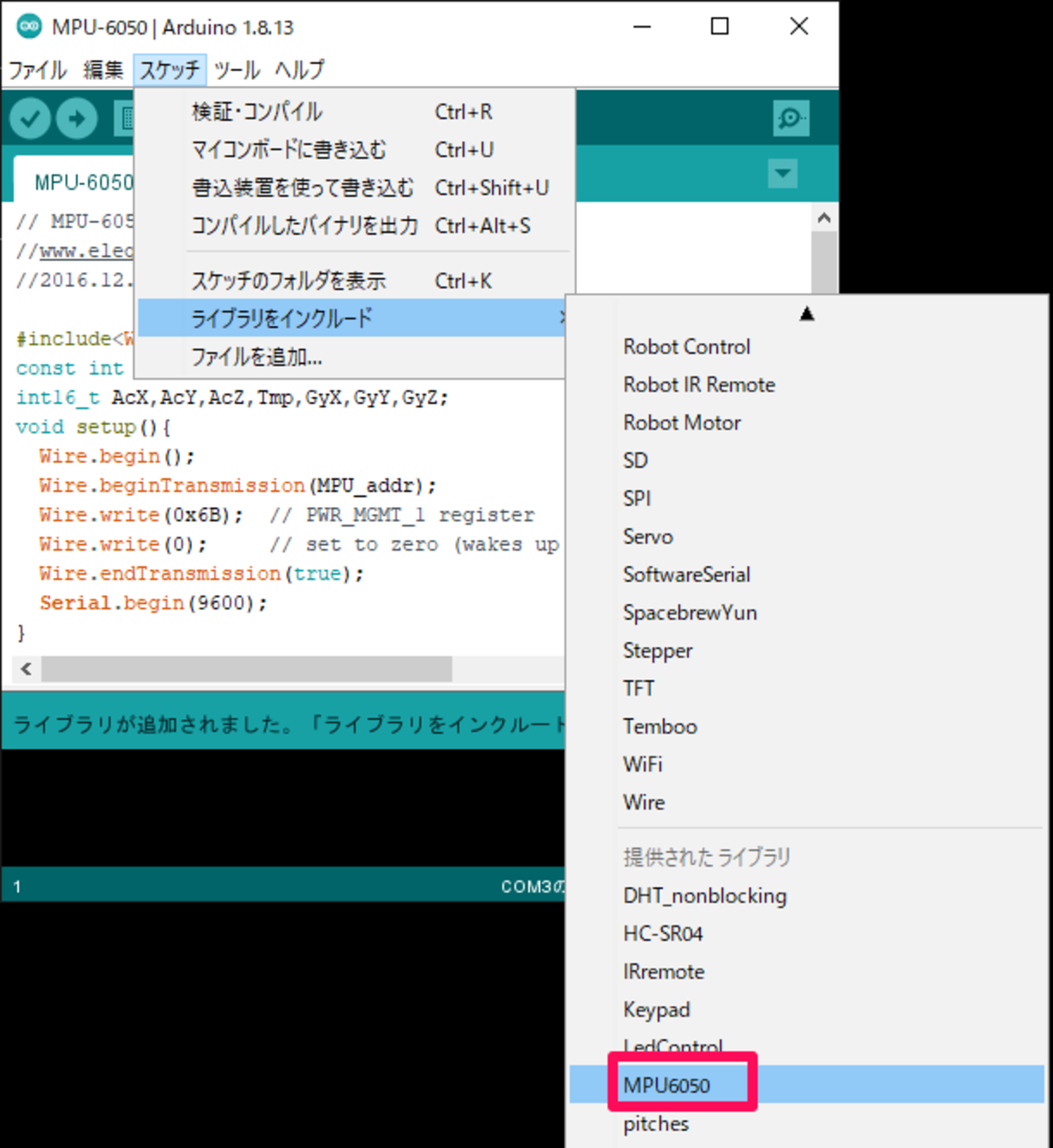
クリックすると、「スケッチ」の「ライブラリをインクルード」に「提供されたライブラリ」として「MPU6050」が追加されますので、こちらをクリックします。
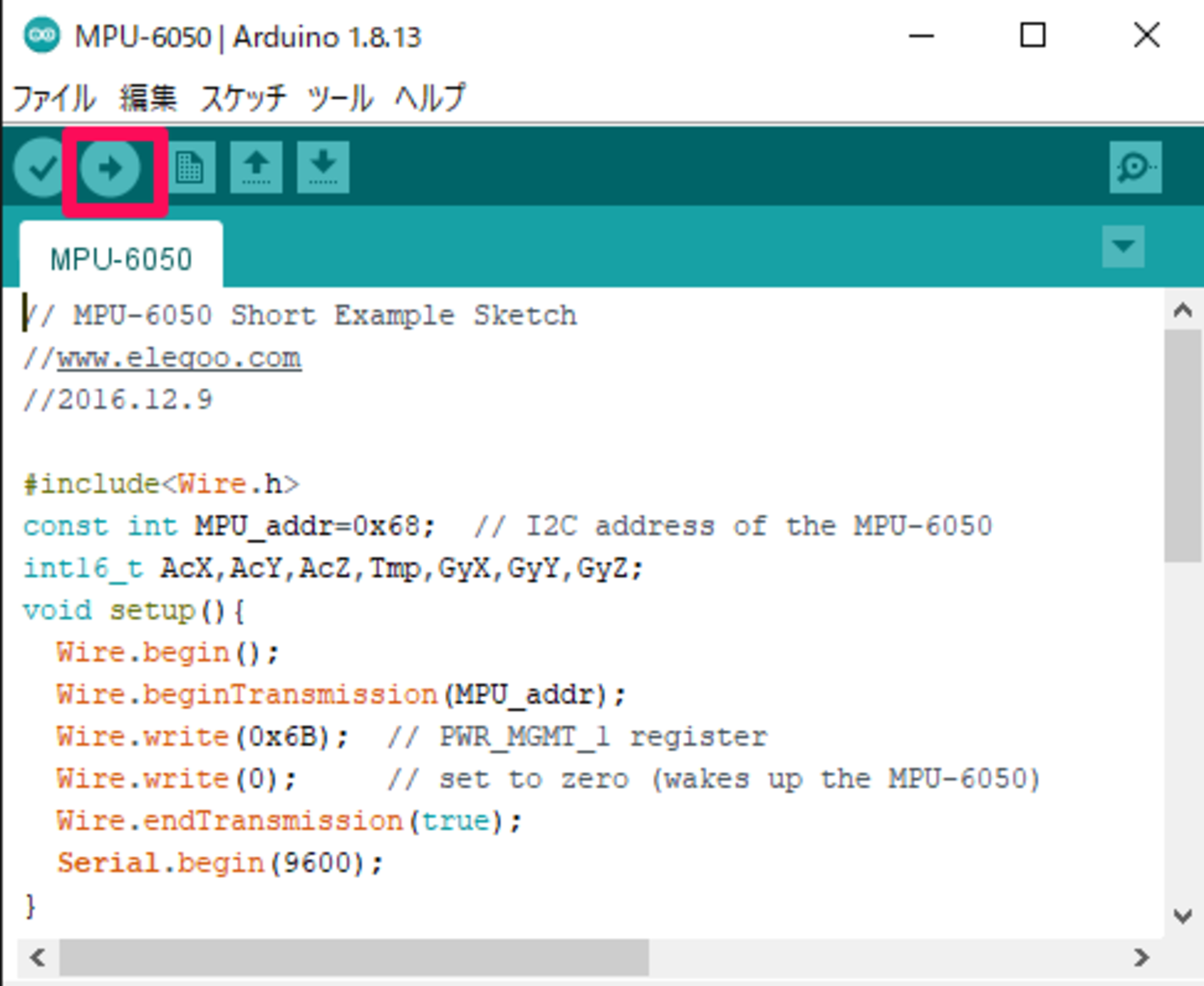
クリックすると、ライブラリが追加された状態になりますので、「Arduino」の上部にある「マイコンボードに書き込む・書込装置を使って書き込み」ボタンをクリックします。クリックする際は、接続したPC(パソコン)でMEGA2560 R3ボードが認識されているかを確認し、クリックします。
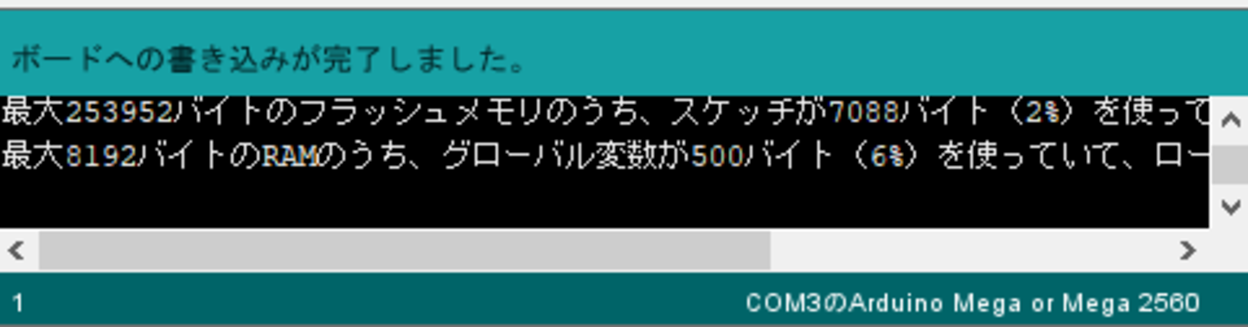
クリックすると、「ボードへの書き込みが完了しました。」と表示され、書き込みが成功しました。
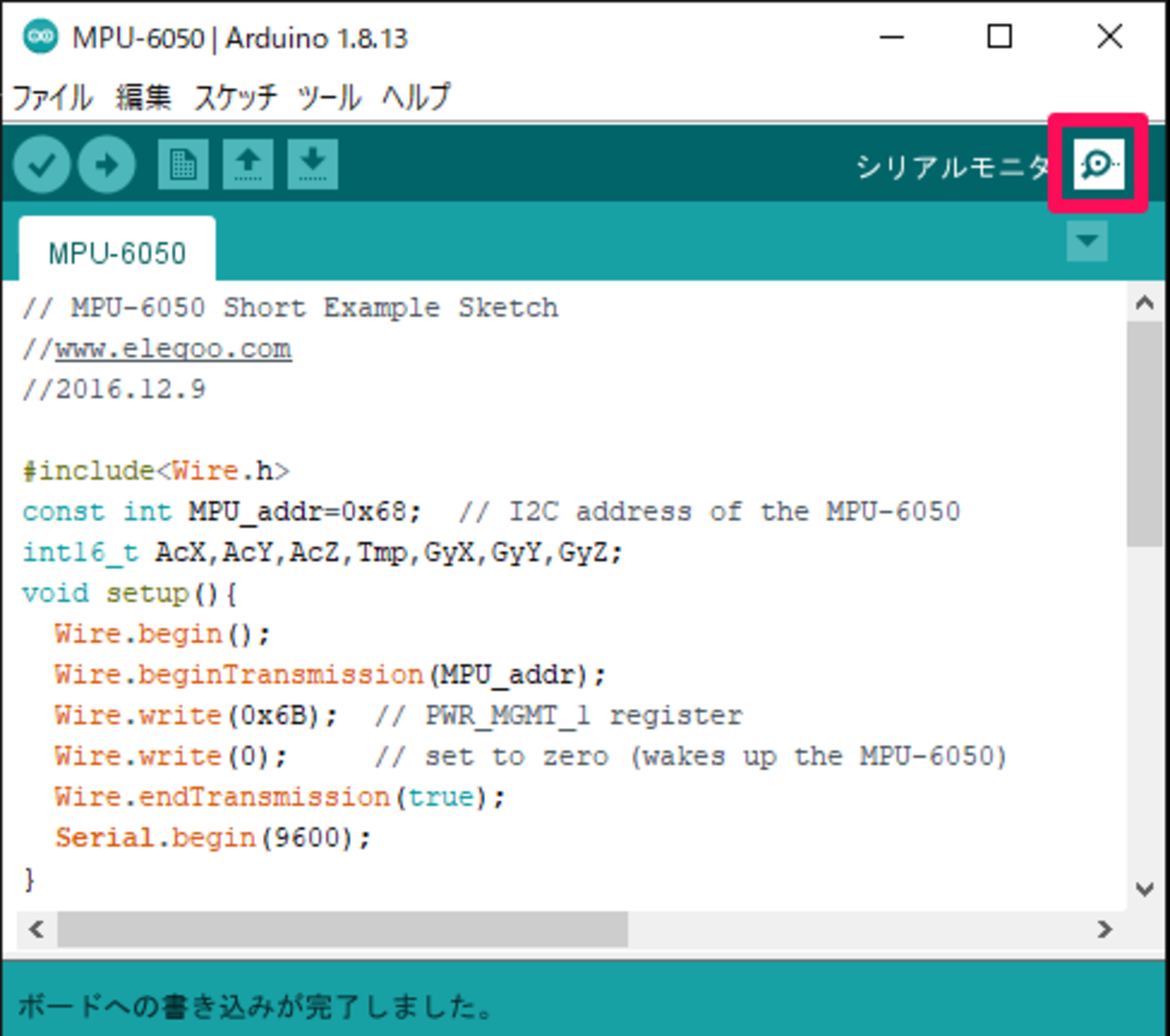
書き込みが成功した後は、「Arduino」のウインドウ上部にある「シリアルモニタ」をクリックします。

クリックすると、「シリアルモニタ」のウインドウが表示され、GY-521モジュール(3軸加速度センサー/ジャイロ・モジュール)で検出された値が出力されます。
GY-521モジュール(3軸加速度センサー/ジャイロ・モジュール)で計測ができたのかの検証
書き込み後、GY-521モジュール(3軸加速度センサー/ジャイロ・モジュール)で計測ができたのかの検証を行いました。
検証を行いましたが、計測されたデータがシリアルモニタで出力されることを確認できました。
コメント